ЭЛЕКТРОННЫЕ СИСТЕМЫ
На некоторых моделях автобусов фирмы «Вольво» (Швеция) применяется электронная система управления ГМП с «жесткой логикой». В состав электронного блока системы управления в основном входят дискретные элементы и только несколько интегральных микросхем. Управление переключением передач осуществляется в зависимости от скорости движения автобуса и нагрузки двигателя. В качестве датчика скорости автобуса используется индукторный датчик, частота выходного сигнала которого пропорциональна частоте вращения ведомого вала ГМП. Датчиком нагрузки двигателя является ступенчатый электрический переключатель, связанный с педалью подачи топлива.
Рис. 71. Структурная схема электронной системы управления ГМП автобусов
Опыт длительной эксплуатации автобуса, оборудованного ГМП с такой системой управления, показал высокую ее надежность. В качестве примера выполнения элементов, входящих в электронную систему управления ГМП, ниже приведено описание отечественной системы управления ГМП автобусов большой вместимости.
Электронная система управления ГМП городских автобусов
Рассматриваемая электронная система предназначена для автоматического управления трехступенчатой гидромеханической передачей с блокируемым гидротрансформатором. По мере разгона автобуса происходит последовательное переключение передач с первой до третьей и далее блокируется гидротрансформатор. Кроме этого, электронная система выполняет защитные функции.
Структурная схема электронной системы управления показана на рис. 71, ее электрическая схема и электронный блок — на рис. 72 и 73, а подключение внешних устройств к электронному блоку — на рис. 74. Схема стабилизатора напряжения СИ и ПЧН приведена на рис. 5 и 17.
В качестве датчика скорости ДС автобуса (см. рис. 71) использован индукторный датчик (см. рис. 43), расположенный над одним из зубчатых колес, установленных на ведомом валу ГМП. Поэтому частота изменения ЭДС на выходе датчика ДС пропорциональна частоте вращения данного вала ГМП, т. е. пропорциональна скорости движения автобуса.
Рис. 72. Схема электронного блока системы управления ГМП автобусов
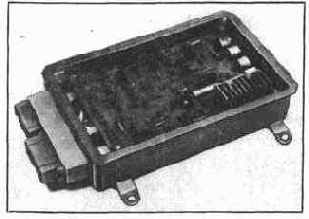
Рис. 73. Электронный блок системы управления ГМП автобусов
Датчик нагрузки ДН двигателя выполнен в виде двух переключателей S1 и S2, приводимых от педали подачи топлива.
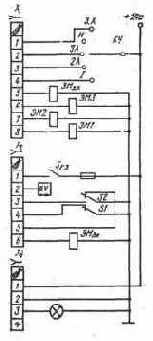
Рис. 74. Схема подключения аппаратуры управления и электромагнитов системы управления ГМП к электронному блоку: К.У — контроллер управления; Sгз — включатель гидрозамедлителя; S1, S2 — микропереключатели датчика нагрузки двигателя; ЭМ1, ЭМ2, ЭМ3, ЗМвд, ЭЛ1з.х — электромагниты системы управления
До тех пор, пока эта педаль находится в положениях, соответствующих подаче менее 50 % максимального значения величины подачи топлива, ни один из переключателей датчика нагрузки не срабатывает (положение контактов переключателей показано на рис. 74). Переключатель S1 срабатывает, когда педаль устанавливается в любое из положений, при которых подача топлива в двигатель составляет от 50 до 100 % максимального ее значения.
Для обеспечения срабатывания переключателя S2 водитель должен установить педаль подачи топлива дальше Положения, соответствующего 100 % подаче топлива в двигатель, преодолев при этом усилие дополнительной пружины. Такой режим носит название «кикдаун», и используется для принудительного включения понижающей передачи автобуса с целью повышения его динамики в процессе обгона.
Помимо основного режима управления гидропередачей, при котором по мере разгона автобуса осуществляется автоматическое переключение всех передач и блокировка гидротрансформатора (положение ЗА контроллера), в системе управления предусмотрены еще следующие режимы:
автоматического переключения первой и второй передач с блокировкой гидротрансформатора после разгона автобуса на второй передаче до заданной скорости (положение 2А контроллера);
принудительного включения первой передачи независимо от скорости движения автобуса (положение 1 контроллера);
принудительного включения передачи заднего хода независимо от скорости движения автобуса (положение З.Х. контроллера).
Кроме того, обеспечивается возможность установки передачи в нейтральное положение (положение Н контроллера).
Задание необходимого режима работы системы управления ГМП осуществляется с помощью контроллера управления КУ, схема подключения которого к электронному блоку приведена на рис. 74.
В табл. 19 указан порядок подключения электромагнитов системы управления к источнику питания в зависимости от включаемой передачи и положения контроллера управления.
Узел пороговых устройств. Команды на переключение передач и блокировку гидротрансформатора вырабатывает пороговое устройство системы управления в зависимости от уровня напряжения на выходе ПЧН и положения переключателей датчика нагрузки ДН. Эти пороговые устройства выполнены на базе токо-разностных усилителей DAI, DA2 и DA3 (см. рис. 71). В режимах автоматического переключения передач ЗА и 2А напряжение к резистору R1 не подводится, вследствие чего транзистор VT1 закрыт, и резистор R10 отключен от массы.
В первом положении датчика нагрузки контакты переключателей S1 и S2 (см. рис. 74) замкнуты, что приводит к замыканию на массу (соответственно через диоды VD5, VD6, VD7, VD8, VD9, VD10) резисторов R14, R15, R16, R19, R20, R21 (см. рис. 72).
Во втором положении датчика нагрузки контакты S1 размыкаются, вследствие чего с массой оказываются соединенными только резисторы R19, R20, R21.
Третьему положению датчика нагрузки соответствует размыкание и замыкание соответствующих контактов переключателя S2. В этом случае с массой оказываются соединенными резисторы
R42, R44 и R46 (соответственно через диоды VD12t VD13 и VDI4). Изменение подключения резисторов в зависимости от положения переключателей S1, S2 датчика нагрузки обеспечивает корректировку переключения передач в соответствии с нагрузкой двигателя.
19. Порядок включения электромагнитов системы управления
|
Положение контроллера |
Включаемая передача |
Электромагниты |
||||
|
ЭМ1 |
ЭМ2 |
ЭМ3 |
ЭМ6Л |
Мз.х |
||
|
ЗА |
Первая Вторая Третья Третья** |
+ — — — |
— + — — |
— — + + |
— — — + |
— — — — |
|
2А |
Первая Вторая Вторая** |
+ — — |
— + + |
— — — |
— — + |
— — — |
|
1 |
Первая |
+ |
— |
— |
— |
— |
|
3. X |
Задний ход |
— |
— |
— |
— |
+ |
|
Н |
Нейтральное положение |
— |
— |
— |
— |
— |
* + — электромагнит включен, — — выключен.
** С режимом блокировки гидротрансформатора.
Управление переключением с первой на вторую передачу и обратно осуществляется пороговым устройством на базе усилителя DA1. Если в автобусе педаль подачи топлива находится в положении, соответствующем первому положению датчика нагрузки, то сила тока Iи, проходящего через инвертирующий вход усилителя, определяется сопротивлением резисторов R7, R14, R19, R29 и установкой подвижного контакта регулировочного переменного резистора R24.
Сила тока Iн, проходящего через неинвертирующий вход усилителя DA1, зависит от напряжения Uy
на выходе ПЧН и сопротивления резистора R30. При низкой скорости движения автобуса величина Uy мала, в связи с чем Iи>Iн, усилитель закрыт и на его выходе напряжение близко к нулевому значению. Когда же вследствие возрастания скорости автобуса до значения vI—II, соответствующего переключению с первой передачи на вторую, сила тока Iи становится больше, чем Iи, то на выходе усилителя появляется напряжение. Это напряжение через делитель напряжения, образованный резисторами R41, R42 (см. рис. 72), и резистор R35 подводится к неинвертирующему входу усилителя DA1. В результате возникающей положительной обратной связи происходит лавинообразное увеличение силы тока Iн, обеспечивающее переход усилителя в режим с высоким уровнем напряжения UВых на его выходе. Появление напряжения UВЫХ является сигналом для переключения с первой на вторую передачу.
Для переключения со второй на первую передачу скорость автобуса должна снизиться до значения VII-I, при котором сила тока Iн станет меньше значения Iи.
При включенной второй передаче, вследствие действия в делителе DA1 положительной обратной связи, уменьшение силы тока Iн до значения, соответствующего Iи, произойдет при скорости VII-I. которая меньше скорости VI-II. Тем самым предотвращается цикличность переключения передач.
При установке педали подачи топлива в положение, соответствующее второму положению датчика нагрузки, вследствие отключения от массы резистора R14 (см. рис. 72), уменьшается падение напряжения в резисторе R7, благодаря чему возрастает сила тока Iи, проходящего через инвертирующий вход усилителя DA1. В результате переключение с первой на вторую передачу и обратно будет происходить при более высоких уровнях напряжения на выходе ПЧН и соответственно при больших скоростях движения автобуса.
На режиме кикдаун вследствие отключения от массы резисторов R14 и R19 переключение с первой на вторую передачу и обратно будет происходить при еще более высоких скоростях движения автобуса. Наряду с этим из-за подключения к массе резистора R42 уменьшится напряжение на средней точке делителя напряжения, образованного резисторами R41 и R48, что приведет к ослаблению эффекта положительной обратной связи в усилителе DA1. Это необходимо для расширения диапазона скоростей автобуса, где может быть реализовано действие режима кикдаун.
Управление переключением со второй на третью передачу и обратно осуществляется пороговым устройством на базе усилителя DA2. Оно действует точно так же, как и пороговое устройство на базе усилителя DA1. Аналогичным образом действует и пороговое устройство на базе усилителя DA3, управляющее включением и выключением блокировки гидротрансформатора.
20. Таблица истинности дешифратора К511ИД1
|
Номер строки |
Уровень напряжения на входах |
Номер выхода, соединенного с массой |
|||||||
|
1 |
2 |
4 |
|||||||
|
Предусмотренные комбинации входных сигналов |
|||||||||
|
1 |
0 |
0 |
0 |
0 |
|||||
|
2 |
1 |
0 |
0 |
1 |
|||||
|
3 |
1 |
1 |
0 |
3 |
|||||
|
4 |
1 |
1 |
1 |
7 |
|||||
|
Непредусмотренные комбинации входных сигналы |
|||||||||
|
5 |
0 |
1 |
1 |
6 |
|||||
|
6 |
1 |
0 |
1 |
5 |
|||||
|
7 |
0 |
1 |
0 |
2 |
|||||
|
8 |
0 |
0 |
1 |
4 |
|||||
Узел логики (УЛ). При движении автобуса с низкой скоростью напряжения на выходах усилителей DAI, DA2 и DA3 (см. рис. 72) близко к нулю, что соответствует уровню «логического 0» для устройств, осуществляющих последующую обработку данных сигналов. По мере разгона автобуса высокое напряжение вначале появляется на выходе усилителя DA1, а затем последовательно на выходах усилителей DA2 и DA3. Данный уровень напряжения является уровнем «логической 1» при последующей обработке сигналов, которая выполняется с помощью дешифратора DD1, в качестве которого применена интегральная микросхема типа К511ИД1. Дешифратор осуществляет преобразование различных комбинаций сигналов на выходе усилителей DAI, DA2 и DАЗ в сигналы, необходимые для включения в заданной последовательности усилителей питания электромагнитов системы управления.
Дешифратор К511ИД1 имеет четыре входа, из которых используются только три (1, 2 и 4). В зависимости от комбинации сигналов с уровнями «логического 0» или «логической 1», подводимых к входам дешифратора, какой-либо один из его выходов соединяется с массой.
Таблица истинности дешифратора (табл. 20) содержит указания, каким комбинациям сигналов на входе дешифратора соответствует соединение с массой того или иного его выхода.
При выполненном в схеме управления соединении выхода усилителя DA1 с входом 1 дешифратора и выходов усилителей DA2, DA3 соответственно с входами 2 и 4 дешифратора напряжение с уровнем «логической I» может появиться на входе с более высоким номером только при наличии такого уровня на входах с более низкими номерами. Такие комбинации сигналов, указанные в строках 1 — 4 табл. 20, в дальнейшем будут обозначаться термином «предусмотренные», поскольку они соответствуют нормальной работе пороговых устройств. Любая другая комбинация сигналов на входах дешифратора, указанная в строках 5 — 8 табл. 20, возможна только при нарушении нормальной работы пороговых устройств. Поэтому в дальнейшем такие комбинации сигналов обозначаются термином «непредусмотренные».
21. Подключение выходных усилителей питания электромагнитов к выходам дешифратора
|
Передача |
Электромагнит |
Транзисторы усилителя |
Номер выхода дешифратора, соединенного с усилителем |
|
|
Выходной |
Предвыходной |
|||
|
Положение ЗА контроллера |
||||
|
Первая |
ЭМ1 |
VT15 |
VT10 |
0 |
|
Вторая |
ЭМ2 |
VT16 |
VT11 |
1 |
|
Третья |
ЭМЗ |
VT12 |
VT17 |
3 |
|
Третья* |
ЭМЗ |
VTJ2 |
VT17 |
3 |
|
ЭМбл |
VT13 |
VT18 |
7 |
|
|
Задний ход |
ЭМз.х |
VT14 |
VT8 |
|
|
Положение 2А контроллера |
||||
|
Первая |
ЭМ1 |
VT15 |
VT10 |
0 |
|
Вторая |
ЭМ2 |
VT16 |
VT11 |
1 |
|
Вторая* |
ЭМ2 |
VT16 |
VT11 |
1 или 3 |
|
эмбл |
VT14 |
VT18 |
7 |
Для обеспечения в процессе разгона автобуса порядка включения электромагнитов, указанного в табл. 19, соединение входов усилителей питания электромагнитов с выходами дешифратора выполнено в соответствии с данными табл. 21 (режимы ЗА и 2А).
При работе гидрозамедлителя во время движения автобуса на второй и третьей передачах в системе управления осуществляется блокировка гидротрансформатора. Это необходимо для того, чтобы в дополнение к тормозному эффекту от работы гидрозамедлителя получить дополнительное тормозное усилие за счет реализации режима торможения двигателем. После включения в ГМП первой передачи во избежание остановки двигателя в процессе торможения автобуса осуществляется разблокировка гидротрансформатора. Это обеспечивается подключением базы транзистора VT6 через резистор R73 к выводу 1 разъема Х2, в результате чего данный транзистор открывается одновременно с подачей команды на включение гидрозамедлителя. Вход усилителя включения блокировки гидротрансформатора (резистор R83) через переход коллектор — эмиттер транзистора VT6 и диоды VD22 и VD23 соединяется соответственно с выходом 1 или 3 дешифратора, один из которых оказывается соединенным с массой при включении в ГМП второй или третьей передач. Тем самым на данных передачах обеспечивается блокировка гидротрансформатора, и ее отключение после включения в ГМП первой передачи,-поскольку при этом отключаются от массы выходы 1 и 3 дешифратора.
Принудительное выключение электромагнита ЭМЗ в режиме 2А обеспечивается за счет соединения вывода 3 разъема XI с базой транзистора VT12 (через диод VD31). Благодаря этому в режиме 2А напряжение от бортовой сети подводится к базе транзистора VTI2, что приводит к закрытию транзисторов VT12 и VT17, требуемому для выключения электромагнита ЭМЗ.
При установке контроллера в положение 2А электромагнит ЭМ2 должен оставаться включенным даже в том случае, когда вследствие разгона автобуса напряжение высокого уровня появится на выходе усилителя DA3 и входе 4 дешифратора, в результате чего произойдет отключение от массы выхода 1 дешифратора (к которому подключен вход усилителя питания электромагнита ЭМ2). Для обеспечения данного требования в схеме использован транзистор VT9, база которого через резистор R75 подключена к выводу 3 разъема XI. В положении 2А контроллера данный транзистор открывается, благодаря чему через его переход коллектор — эмиттер и диод VD26 соединяются между собой выход 1 и выход 3 дешифратора, который подключается к массе, как только от нее отключается выход 1 дешифратора. В результате сохраняется замкнутой входная цепь усилителя питания электромагнита ЭМ2.
Блок выходных усилителей (БУ). Все выходные усилители выполнены по одинаковой схеме. Каждый из них содержит два коммутирующих транзистора (выходной и предвыходной). Коллектор выходного транзистора соединен с обмоткой электромагнита ГМП, а база предвыходного транзистора через резистор подключена к соответствующему выходу дешифратора. Эмиттер выходного транзистора через небольшой резистор узла защиты от перегрузки, контакты KALI (см. рис. 72) реле КА1 защиты и соответствующие контакты контроллера управления подключается к бортовой сети автобуса. Выходной усилитель открывается, когда соединяется с массой выход дешифратора, к которому подключена база предвыходного транзистора усилителя.
В положении 1 контроллера должны быть отключены электромагниты ЭМ2 и ЭМЗ. Для выполнения этого требования база транзистора VT12 через диод VD3J, а база транзистора VT11 через диод VD37 подключены к выводу 4 разъема XI. В результате при установке контроллера в положение 1 напряжение бортовой сети окажется подведенным к базе транзисторов VTJ1 и VT12, что обеспечит закрытие транзисторов VT11 и VT16, требуемое для выключения электромагнита ЭМ2, и транзисторов VT12 и VT17, необходимое для выключения электромагнита ЭМЗ.
Защита усилителей питания электромагнитов от перегрузки по току (в том числе при коротком замыкании в их выходной цепи) осуществляется элементами защиты, входящими в состав усилителя. Так, например, для защиты усилителя питания электромагнита ЭМ1 первой передачи используются транзисторы VT20 и VT25, конденсатор С7 и резисторы R94, R99, R105 и R106. Принцип действия такой защиты был описан выше (см. рис. 40). После срабатывания данной защиты для ее отключения необходимо переключение дешифратора в положение, соответствующее размыканию входной цепи усилителя, защита которого сработала, или следует установить контроллер управления в положение Н для отключения электронного блока от источника питания.
Блок, принудительного включения передач. Блок БП обеспечивает возможность принудительного включения первой передачи и передачи заднего хода при установке контроллера управления в положения соответственно 1 и З.Х (см. рис. 74).
В положении 1 контроллера напряжение от бортовой сети через вывод 4 разъема XI, диод VD40 (см. рис. 72), контакты КА1.1 реле КА1 защиты и резистор R105 подводятся к эмиттеру транзистора VT15 усилителя питания электромагнита ЭМ1, а через , резистор R69 и стабилитрон VD21 данное напряжение подводится к базе транзистора VT8. Это обеспечивает открытие транзистора VTS, в результате чего включаются транзисторы VT10 и VT15, осуществляя подключение к бортовой сети электромагнита ЭМ1.
В положение З.Х контроллера через контакт 1 разъема XI напряжение от бортовой сети через резистор R103 подводится к эмиттеру транзистора VT14 усилителя питания электромагнита ЭМз.х- Кроме того, напряжение через диод VD41, резистор R70 и стабилитрон VD21 подводится к базе транзистора VT8, что обеспечивает его открытие. В результате включается транзистор VT14 и подключает электромагнит ЗМз.х к бортовой сети.
Для защиты ГМП от недопустимого включения первой передачи или передачи заднего хода в случае движения автобуса со скоростями, выше заданных, используется транзистор VT7, входящий в БП. При движении автобуса с большой скоростью на выходе усилителя DA1 создается высокий уровень напряжения. Это обеспечивает включение транзистора VT7 и тем самым предотвращается возможность включения транзистора VT8 в случае ошибочной установки контроллера управления в положение 1 или З.Х. Разрешение на принудительное включение первой передачи и передачи заднего хода поступает лишь после того, как вследствие снижения скорости автобуса усилитель DA1 переключается в состояние с низким уровнем напряжения на его выходе.
При установке контроллера управления в положение З.Х напряжение от вывода 1 разъема XI подводится к резистору R1. Это обеспечивает открытие транзистора VT1, благодаря чему уменьшается сила тока, проходящего через инвертирующий вход усилителя DA1. В результате переключение усилителя DA1 в режим высокого уровня напряжения на его выходе будет происходить при более низкой скорости автобуса, чем при установке контроллера в положение 1. Поэтому включение передачи заднего хода оказывается возможным при меньшей скорости автобуса по сравнению с допустимой для включения первой передачи.
Система защиты предохраняет ГМП от включения первой передачи или передачи заднего хода, если они до этого не были включены. Однако в тех случаях, когда та или другая из этих передач уже была включена, то независимо от скорости движения автобуса они не будут выключаться. Это достигается за счет действия транзистора VT5 (см. рис. 72), который открывается, как только происходит включение передачи заднего хода или первой передачи. В результате к базе транзистора VT5 подводится напряжение (через резистор R80 от коллектора транзистора VT15 или через резистор R78 от коллектора транзистора VT14). Открытый транзистор VT5 независимо от уровня напряжения на выходе усилителя DA1 обеспечивает отсутствие напряжения на базе транзистора VT7. Поэтому транзистор VT7 оказывается закрытым и не будет препятствовать включению транзистора VT8.
Узел защиты (УЗ). Ошибочная подача команды на одновременное включение двух и более электромагнитов может иметь место при неисправностях элементов управления выходными усилителями электронного блока или в случае пробоя транзисторов этих усилителей, вследствие чего они становятся неуправляемыми.
Для того чтобы исключить аварийное включение ГМП при любой из указанных неисправностей, в системе управления используется специальное электромагнитное реле защиты. Контакты реле размыкаются и отключают усилители питания электромагнитов от бортовой сети при поступлении от системы управления команды на срабатывание защиты.
Основным управляющим элементом устройства защиты является операционный усилитель DA6 (интегральная микросхема К553УД2).
К инвертирующему входу 4 усилителя (см. рис. 72) через резистор R28 подводится постоянное напряжение от делителя напряжения, образованного резисторами R22 и R23.
Неинвертирующий вход 5 усилителя через резисторы R5, R6, R12, R13 и разделительные диоды VD1, VD2, VD3 и VD4 соединен с коллекторами выходных транзисторов БУ. Кроме того, к входу 5 усилителя подводится напряжение от средней точки делителя напряжения, образованного резисторами R17 и R18. Номиналы указанных резисторов выбраны таким образом, что при включении одного (любого) из выходных усилителей питания электромагнитов напряжение на инвертирующем входе 4 усилителя DA6 превышает напряжение на его неинвертирующем входе 5. В этом случае напряжение на выходе усилителя DA6 имеет низкий уровень, недостаточный для открытия транзистора VT3. В результате обеспечивается открытие транзистора VT4 с подключением к бортовой сети обмотки КА1 реле защиты. При срабатывании этого реле замыкаются его нормально разомкнутые контакты KA1.1, благодаря чему через них подводится напряжение от бортовой сети к эмиттерам выходных транзисторов БУ. В случае же одновременного (непредусмотренного) включения двух и более выходных усилителей к неивертирующему входу 5 усилителя DA6 подводится напряжение, которое превышает напряжение, подводимое к его инвертирующему входу 4. Это приводит к появлению напряжения высокого уровня на выходе усилителя, следствием чего является открытие транзистора VT3 и закрытие транзистора VT4 с отключением от бортовой сети обмотки КА1 реле защиты. В результате происходит выключение реле с разрывом его размыкающих контактов и отключением БУ от бортовой сети. За счет замыкания при этом замыкающих контактов KALI реле включается цепь питания лампы индикации срабатывания защиты. Через резистор R68 и диод VD19 подается напряжение на базу транзистора VT7, открытие которого обеспечивает выключение транзистора VT8, благодаря чему в случае непредусмотренного схемой включения двух выходных усилителей исключается возможность принудительного включения как первой передачи, так и передачи заднего хода. Как только на выходе усилителя DA6 появляется напряжение высокого уровня, оно через диод VD11 и резистор R38 подводится к входу 5 усилителя. Это обеспечивает повышение напряжения на неинвертирующем входе 5 усилителя до значения, которое превышает напряжение на инвертирующем входе 4 усилителя даже при условии выключения всех усилителей питания электромагнитов.
Под действием в усилителе DA6 положительной обратной связи защита не отключается и после того, как в результате ее срабатывания выключаются все усилители питания и электромагнитов. Для отключения защиты водитель должен сначала перевести контроллер в положение Я, а затем вновь установить его в требуемое положение.
Устройство защиты от непредусмотренного включения низших передач при отказе датчика скорости является ответственным элементом электронной системы управления ГМП, так как отказ датчика скорости воспринимается системой, как остановка автобуса. В результате этого должна последовать команда на включение первой передачи, что при движении автобуса с высокой скоростью может привести к созданию аварийной ситуации.
Принцип действия рассматриваемой защиты основан на контроле сопротивления обмотки датчика скорости. В состав устройства защиты входят токоразностные усилители DA4, DA5, резисторы R55 — R63 и диоды VD17, VD18 (см. рис. 72).
Особенности работы такого устройства защиты были изложены выше. В случае отказа датчика скорости на выходе усилителя DA4 или DA5 появляется напряжение высокого уровня. Это напряжение через резистор R47 подводится к базе транзистора VT3, что приводит к его открытию и закрытию транзистора VT4 с разрывом цепи питания обмотки КА1 реле защиты. В результате выключается реле, что обеспечивает отключение всех электромагнитов системы управления ГМП от бортовой сети автобуса.
В случае отказа порогового устройства на его выходе независимо от скорости движения автобуса может появиться сигнал, соответствующий либо уровню «логического О» или уровню «логической 1». Непредусмотренное при этом появление напряжения с уровнем «логической 1» на любом из выходов дешифратора не является опасным для эксплуатации автобуса, поскольку в таком случае может лишь произойти самопроизвольное переключение на высшую передачу. Значительно опаснее случаи непредусмотренного уменьшения напряжения на выходе дешифратора до уровня «логического О», поскольку в результате этого может быть выработана команда на самопроизвольное включение низших передач.
В рассматриваемой системе управления использование в качестве узла логики дешифратора DD1 позволило уменьшить опасность такого непредусмотренного включения низших передач.
Если во время движения автобуса с высокой скоростью вследствие отказа усилителей DA1 или DA2 напряжение на входе 1 или 2 дешифратора снижается до уровня «логического О», то это приводит к появлению непредусмотренной комбинации сигналов на входе дешифратора (табл. 20). В результате отключаются от массы выходы 0, 1, 3 и 7 дешифратора, которые подключают цепи питания всех выходных усилителей. Тем самым предотвращается самопроизвольное аварийное включение низших передач. С целью предотвращения переключения ГМП в нейтральное положение, что в ряде случаев нежелательно с точки зрения безопасности эксплуатации автобуса, в схеме управления выполнено соединение между собой выходов 2 — 6 дешифратора, благодаря чему при любой непредусмотренной комбинации сигналов на входе дешифратора во время движения автобуса с высокой скоростью обеспечивается включение третьей передачи.
22. Порядок переключения передач при отказе усилителей пороговых устройств
|
Скорость автобуса |
Номер входа дешифратора |
Номер выхода, соединенного с массой |
Передача |
||
|
1 |
2 |
4 |
|||
|
Усилители исправны |
|||||
|
0-VI-II |
0 |
0 |
0 |
0 |
Первая |
|
VI-II — VII-III |
1 |
0 |
0 |
1 |
Вторая |
|
VII-III-VIII-(III+Бл)* |
1 |
1 |
0 |
3 |
Третья |
|
Более VIII-(III+Бл) |
1 |
1 |
1 |
7 |
Третья** |
|
Отказ усилителя DA1 |
|||||
|
0—VI-II |
0 |
0 |
0 |
0 |
Первая |
|
VI-II — VII-III |
0 |
0 |
0 |
0 |
» |
|
VII-III —VIII-(III+Бл) Более VIII-(III+Бл) |
0 0 |
1 1 |
0 1 |
2 6 |
Третья » |
|
Отказ усилителя DA2 |
|||||
|
0-VI-II |
0 |
0 |
0 |
0 |
Первая |
|
VI-II — VII-III |
1 |
0 |
0 |
1 |
Вторая |
|
VII-III —VIII-(III+Бл) |
1 |
0 |
0 |
1 |
» |
|
Более VIII—(III+БЛ) |
1 |
0 |
1 |
5 |
Третья |
|
Отказ усилителей DA1 и DA2 |
|||||
|
0—VI-II |
0 |
0 |
0 |
0 |
Первая |
|
VI—II —VII-III |
0 |
0 |
0 |
0 |
» |
|
VII-III —VIII-(III+Бл) Более VIII-(III+Бл) |
0 0 |
0 0 |
0 1 |
0 1 |
» Третья |
* VIII-(III+Бл) — скорость, соответствующая вклкечению блокировки гидротрансформатора .
** С режимом блокировки гидротрансформатора.
В табл. 22 приведен порядок переключения передач при различных скоростях движения автобуса для любых вариантов отказов усилителей DA1 и DA2. Анализ данных показывает, что в случае отказа одного из этих усилителей в зоне средних и низких скоростей движения в худшем случае произойдет переключение «вниз» только на одну передачу.
Лишь в случае одновременного отказа обоих усилителей, что мало вероятно, в диапазоне скоростей VII-III-VIII-(III+Бл) возможно переключение «вниз» на две передачи, а в остальных диапазонах скоростей может иметь место переключение «вниз» только на одну передачу.
Следует отметить, что при незначительном усложнении схемы возможно предотвратить переключение «вниз» на две передачи в случае отказа обоих усилителей. Для этого достаточно соединить выход усилителя DA2 с инвертирующим входом усилителя DA3 (через резистор R52 и диод VD15, как это показано штриховой линией на рис. 72). Благодаря такому подключению в случае отказа усилителя DA2 переход усилителя DA3 в режим с высоким уровнем выходного напряжения произойдет при более низкой скорости автобуса, т. е. наиболее опасная комбинация на входах дешифратора (000) сместится в зону меньших скоростей движения автобуса.
МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ
Микропроцессорные системы управления в последнее воемя все чаще используют для управления ГМЛ автобусов, грузовых и легковых автомобилей. Система управления фирмы «Аллисон» с условным обозначением АТЕС предназначена для управления трех- пятиступенчатыми ГМП, оборудованными блоком электромагнитных клапанов (ЭМ ГМП). С помощью этих клапанов осуществляется управление исполнительными устройствами (фрикционами) ГМП. Система АТЕС (рис. 75) является многофункциональной системой управления. В зависимости от сигналов, поступающих от датчика скорости ДС, контролирующего скорость автомобиля, и датчика нагрузки ДН двигателя, микропроцессор в соответствии с заложенной в него программой и с учетом положения контроллера управления KУ вырабатывает команды на переключение передач и блокировку гидротрансформатора. Эти сигналы усиливаются силовыми элементами системы управления и далее поступают к электромагнитам привода соответствующих гидравлических клапанов. Исполнительными устрой- ствами ГМП являются фрикционы, включением и выключением которых управляют указанные гидравлические клапаны.
Рис. 75. Структурная схема микропроцессорной системы управления ГМП грузовых автомобилей
Кроме выработки сигналов на переключение передач система управления осуществляет ряд функций защиты передачи от аварийных режимов, а также используется для диагностирования состояния узлов ГМП по сигналам датчиков температуры масла ДТ и давления в системе ДР.
ГМП является сложным и дорогостоящим агрегатом, поэтому своевременная сигнализация о возможных ее неисправностях позволяет существенно повысить эксплуатационную надежность ГМП. Система может быть применена для управления трансмиссиями различного типа благодаря тому, что корректировка алгоритма управления применительно к различным типам трансмиссий требует лишь изменения программы, записываемой в ППЗУ, т. е. сама система не претерпевает никаких конструктивных изменений.
Рис. 76. Структурная схема микропроцессорной системы управления ГМП
Использование микропроцессорной системы управления ГМП обеспечивает переключение передач при скоростях движения автомобиля, отличающихся не более чем на 1 % от их оптимальных значений. При применении гидравлической системы управления допуск скоростей, соответствующих переключению передач, составляет 5 — 10%.
Сравнительные испытания ГМП с гидравлической и микропроцессорной системами управления показали, что применение последней позволяет экономить до 7 — 8 % топлива.
Система управления АТЕС выполняет следующие защитные функции:
предотвращает возможность включения передачи заднего хода при скорости движения выше установленного предела;
запрещает переключений передач в случае пробуксовывания или блокировки колес автомобиля при торможении, благодаря чему исключается ошибочное действие системы управления;
предотвращает чрезмерное увеличение частоты вращения коленчатого вала при спуске с горы с включенным замедлителем.
Рис. 77. Электронный блок микропроцессорной системы управления ГМП и электромагнитные клапаны
Кроме того, система управления,- будучи связанной с встроенными устройствами диагностирования, не только сигнализирует водителю о наличии каких-либо неисправностей или отклонении показателей ГМП от нормы (перегрев масла или недопустимое изменение давления в гидросистеме), но и записывает в памяти эти данные для последующего анализа причин появления неисправностей.
Микропроцессорная система управления для четырехступенча той планетарной ГМП типа 4НР22 [39] предназначена для применения в легковых автомобилях (БВМ) большого класса. Структурная схема ее представлена на рис. 76, а электронный блок на рис. 77.
Режим автоматического переключения передач реализуется при установке контроллера управления KУ в положение D. При этом в зависимости от положения избирателя программ, заранее устанавливаемого водителем в то или иное положение, обеспечивается переключение передач по программе е, соответствующей наилучшей топливной экономичности или по программе s, позволяющей реализовать наивысшие динамические показатели автомобиля.
При переключении передач по программе s четвертая передача не включается. Данный режим переключения используют при эксплуатации автомобиля в горных условиях или при движении с прицепом.
Установка избирателя программ в положение ру (ручное уп-авление) обеспечивает отключение автоматики, что позволяет водителю с помощью контроллера управления принудительно включать первую — третью передачи переднего хода, а также передачу заднего хода (см. рис. 76, положение R). Положение Р контроллера используется для механического соединения ведущего вала 1МП с картером для обеспечения затормаживания неподвижного автомобиля во время стоянок.
Электронный блок выполняет следующие функции управления:
вырабатывает команды на переключение ступеней передачи и блокировку гидротрансформатора в зависимости от скорости автомобиля и нагрузки двигателя путем подключения к источнику электропитания электромагнитов ЭМ ГМП привода гидравлических клапанов управления тормозами ГМП;
воздействует на электронную систему зажигания двигателя для уменьшения крутящего момента двигателя, что позволяет снизить нагрузки в трансмиссии автомобиля и увеличить плавность процесса переключения в период переключения передач. Тем самым обеспечивается уменьшение работы буксования фрикционных элементов системы управления ГМП;
осуществляет регулирование давления в гидросистеме ГМП с учетом режима ее работы путем воздействия на электромагнит ЭЛ1рД системы регулирования давления, что позволяет снизить потери в ГМП, и благоприятно влияет на плавность процесса переключения передач:
корректирует режимы переключения в зависимости от теплового режима двигателя благодаря подключению электронного блока к датчику температуры ДТ;
обеспечивает режим переключения передач, соответствующий максимальному использованию мощности двигателя, при подаче сигнала от выключателя кикдаун 5К — Д;
защищает передачу от аварийных режимов в случае неправильных действий водителя или отказа элементов системы управления. В частности, система защиты предотвращает возможность ошибочного включения передачи заднего хода при движении автомобиля вперед со скоростью выше заданной. Также исключается возможность переключения с третьей на вторую и со второй на первую передачу при скоростях движения, превышающих их заданные максимальные значения.
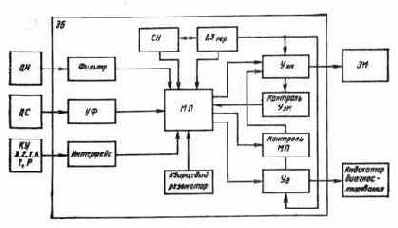
Рис. 78. Структурная схема микропроцессорной системы управления ГМП легковых автомобилей
В случае отключения системы управления от источника питания осуществляется автоматическое включение третьей передачи (с помощью подпружиненного гидравлического клапана-).
Микропроцессорная система применяется для управления трехступенчатыми планетарными ГМП легковых автомобилей «Рено» мод. R9S, 18i и «Фуэго» [36, 40].
В зависимости от положения рычага контроллера управления KУ (рис. 78) сигналы от него через интерфейс поступают в микропроцессор МП, что обеспечивает следующие режимы работы ГМП: автоматическое переключение всех трех передач (положение D контроллера), автоматическое переключение первой и второй передач (положение 2), принудительное включение первой передачи (положение 1), передачи заднего хода (положение R), установка в нейтраль (положение N) и блокировка передачи (положение Р).
Переключением передач при установке контроллера в положения D, 2 и 1 управляют два клапана с электромагнитным приводом (ЭМ1 и ЭМ2). Порядок включения этих клапанов на различных передачах приведен ниже (знаком + отмечено подключение электромагнитов их привода к источнику питания).
|
Положение контроллера ......... |
D |
D |
D |
D |
2 |
2 |
1 |
|
Передача ...... |
Первая |
Вторая |
(Вторая — третья) |
Третья |
Первая |
Вторая |
Первая |
|
Включение электромагнитов: |
|||||||
|
ЭМ1 ........ ЭМ2 ........ |
— + |
+ + |
(+) (—) |
— — |
— + |
+ + |
— + |
При отключении электромагнитов от источника питания в случае установки контроллера в положения 1, 2 и D включается третья передача, а установка контроллера в положения R, N и Р обеспечивает включение соответственно передачи заднего хода, нейтрали и режима блокировки передач.
Структурная схема рассматриваемой микропроцессорной системы управления представлена на рис. 78. Основным элементом ее электронного блока ЭБ является микропроцессор типа 80А22, в состав которого входят собственно микропроцессор, счетчик, генератор, ОЗУ с памятью объемом 64 слова, ПЗУ с памятью объемом 2048 слов, 28 линий ввод-вывод, из которых две идут от входящего в состав микропроцессора аналого-цифрового преобразователя и еще две рассчитаны на выходной ток до 7 мА. Допустимое напряжение питания микропроцессора 4,5 — 6,5 В, рабочий температурный диапазон от — 40 до 100 С, число команд — более 70. По существу, данный микропроцессор является микроЭВМ.
Автоматическое переключение передач осуществляется в зависимости от двух параметров — скорости движения автомобиля и нагрузки двигателя. Требуемые для этой цели сигналы поступают в электронный блок через усилитель-формирователь УФ от датчика скорости ДС автомобиля индукторного типа и через фильтр — от датчика нагрузки ДН двигателя, выполненного в виде потенциометра, приводящегося от педали подачи топлива. С помощью этого потенциометра реализуется и режим кикдаун, используемый для обгонов.
Связь потенциометра с педалью управления дроссельной заслонкой выполняется таким образом, что при полностью отпущенной педали напряжение на его выходе не снижается до нуля. Наличие на выходе потенциометра напряжения не ниже определенного уровня является индикатором его исправности и используется в системе защиты ГМП от неправильного срабатывания. С учетом сигналов, получаемых от датчиков скорости автомобиля и нагрузки двигателя, в соответствии с заданной программой микропроцессор вырабатывает команды управления клапанами ЭМ1 и ЭМ2, обеспечивающие требуемые переключения передач. Для того чтобы произошло переключение со второй на третью передачу, необходимо отключить от источника питания оба клапана. Однако нельзя гарантированно обеспечить строго одновременного выключения обоих клапанов, в связи с чем возможен случай, когда клапан ЭМ1 выключится несколько раньше клапана ЭМ2. В результате какое-то время при выключенном клапане ЭМ1 клапан ЭМ2 окажется включенным. Это соответствует включению первой передачи, т. е. вместо того, чтобы произошло переключение со второй на третью передачу, будет иметь место переход со второй на первую передачу.
Для предотвращения такой возможности микропроцессорная система управления после выработки команды перехода со второй на третью передачу, задерживает на небольшой период времени выключение клапана ЭМ1, благодаря чему в период переключения возможна только комбинация в виде открытого клапана ЭМ1 и закрытого клапана ЭМ2 с последующим закрытием обоих клапанов.
Помимо выработки команд на переключение передач микропроцессорная система управляет перекрытием включения фрикционов и тормозов ГМП, обеспечивая необходимую плавность процесса переключения.
Программой, заложенной в микропроцессорную систему, предусмотрено выполнение следующих защитных функций: предотвращение непредусмотренного переключения со второй или третьей на первую передачу при отказе датчика скорости. Для решения этой задачи сигнал датчика скорости автомобиля после его поступления в микропроцессор сравнивается с пороговым сигналом, соответствующим скорости движения 3 км/ч. Если при движении автомобиля на второй или третьей передачах сигнал преобразователя оказался ниже порогового сигнала, то это свидетельствует о неисправности преобразователя, и переключение на первую передачу запрещается. Одновременно выдается сигнал неисправности на контрольную лампу;
исключение неправильного функционирования системы управления в случае отказа датчика нагрузки. Если такой отказ происходит и напряжение на выходе датчика снижается- до нуля, вместо заданного минимального его значения при исправном датчике, то система управления не принимает сигналов от датчика нагрузки и при этом включается третья передача;
контроль прохождения в микропроцессоре заданной программы. Для этой цели в конце выполнения микропроцессором отдельных участков программы выдается короткий импульс, который запускает одновибратор. Сигнал, вырабатываемый одновиб-ратором, более продолжительный, чем период выполнения участка программы между двумя соседними импульсами. Благодаря этому при нормальном функционировании микропроцессора на выходе одновибратора все время поддерживается высокий уровень сигнала. Если же в работе микропроцессора происходят остановки или «зацикливание», то на выходе одновибратора появляется напряжение низкого уровня, что является сигналом неисправности. Этот элемент защиты, имеющий обозначение «Контроль МП» (см. рис. 78) обеспечивает отключение усилителей Уэм питания электромагнитов клапанов;
проверка правильности прохождения команд через усилители уэм питания электромагнитов клапанов сопоставлением сигналов на входах и выходах усилителей. При несоответствии этих сигналов микропроцессор вырабатывает команду на выключение усилителей. Блок защиты Б3пер
предотвращает ошибочные переключения во время переходных процессов в системе.
Помимо выполнения защитных операций микропроцессор все обнаруженные неисправности через усилитель диагностики Уд отображает на индикаторе диагностики, сигнализируя о них водителю. Кроме того, код этих неисправностей записывается в память микропроцессора и сохраняется в ней до тех пор, пока к микропроцессору подведено напряжение питания.
Микропроцессорные системы управления ГМП, так же как и электронные системы управления с «жесткой» логикой, осуществляют переключение передач по одинаковому принципу, то есть в зависимости от двух параметров — скорости автомобиля и нагрузки двигателя. Особенность применения микропроцессорных систем включается в том, что с их помощью наилучшим образом могут быть решены задачи регулирования давления в гидросистеме, диагностирования состояния узлов ГМП, вопросы защиты передачи от аварийных режимов, а также вспомогательные информационные задачи (с помощью цифровых спидометров, тахометров и т. д.). Микропроцессорные системы могут быть использованы и для регулирования темпа включения фрикционов ГМП с целью обеспечения высокой плавности движения автомобиля во время переключения передач.
АНТИБЛОКИРОВОЧНЫЕ ТОРМОЗНЫЕ СИСТЕМЫ
Из теории автомобиля известно, что качение колеса в процессе его затормаживания может происходить только в том случае, когда тормозной момент, прикладываемый к колесу, уравновешивается реактивным моментом, равным произведению нормальной нагрузки Pz, действующей на колесо, на продольный коэффициент его сцепления с дорогой фп. Величина коэффициента сцепления фп зависит как от состояния дорожного покрытия, так и от величины проскальзывания колеса по отношению к покрытию. Величину проскальзывания колеса оценивают безразмерным коэффициентом
s = (va — vт)/va,
где va — скорость автомобиля; Vт
— скорость колеса в точке его соприкосновения с дорожным покрытием.
При увеличении s от нуля до определенной величины SKp (рис. 79) происходит увеличение коэффициента фп. В диапазоне значений s = sKp-:-l по мере увеличения значения s коэффициент фд уменьшается. Вследствие этого если тормозной момент MТ, прикладываемый к колесу, не превысит значения Р2фпmах, то в процессе торможения автомобиля будет иметь место качение колеса при одновременном его проскальзывании. Величина этого проскальзывания установится именно такой, какая необходима для получения коэффициента фпт» определяемого выражением фпт = MT/PZ.
Если же момент Мг окажется больше произведения P2фпmах, то даже при значении s=skp реактивный момент не сможет уравновесить тормозной момент. В результате этого скольжение s превысит значение skp, что повлечет за собой дальнейшее уменьшение коэффициента фп и в конечном итоге вызовет блокировку колеса.
Поскольку при s=l коэффициент фп значительно меньше значения фптах, тормозные качества автомобиля при блокировке колес существенно ухудшаются. Блокировка колес автомобиля крайне нежелательна еще и потому, что в этом случае происходит резкое уменьшение поперечного (бокового) коэффициента сцепления фб колеса с дорогой, как это показано на рис. 79. В результате могут быть потеряны устойчивость и управляемость автомобиля.
Рис. 79. Зависимость продольного фп и поперечного фб коэффициентов сцепления автомобильного колеса от величины его проскальзывания s:
------ сухая дорога;
- - - - скользкая дорога
Очевидно, что названные опасные последствия могут иметь место в случае торможения автомобиля при низких значениях коэффициентов сцепления Фп и Фб. Поэтому основной задачей антиблокировочных тормозных систем является поддержание в процессе торможения автомобиля такого тормозного момента, который при данном состоянии дорожного покрытия исключит -возможность блокировки колес и обеспечит максимально возможный эффект торможения.
Для решения данной задачи антйблокировочная система (АБС) должна в зависимости от характера изменения частоты вращения затормаживаемых колес автоматически изменять давление в цилиндрах или тормозных камерах исполнительных тормозных механизмов. При этом необходимо обеспечить высокое быстродействие регулирования давления, для чего используют быстродействующие клапанные устройства с электромагнитным приводом (так называемые модуляторы давления).
Многолетний опыт разработки и исследования антиблокировочных устройств показал, что очень жесткие требования, предъявляемые к этим устройствам, могут быть удовлетворены только при условии применения электронных систем управления. В настоящее время уже серийно выпускается ряд электронных антиблокировочных тормозных систем на базе как электронных блоков с жесткой логикой, так и микропроцессорных комплектов. Они предназначены для автомобилей, имеющих гидравлический и пневматический привод тормозных механизмов, причем может быть обеспечено индивидуальное управление процессом торможения каждого из колес и одновременное воздействие на несколько затормаживаемых колес.
Рис. 80. Структурная схема электронной антиблокировочной системы управления тормозами
Рассмотрим принцип действия различных АБС [6, 11, 22]. Следует отметить, что для обеспечения нормального функционирования системы она должна непрерывно сравнивать скорость автомобиля и частоту вращения затормаживаемого колеса.
Основная трудность решения этой задачи связана с отсутствием надежных и простых прямых методов определения скорости автомобиля, т. е. методов, не связанных с измерением частоты вращения его колес. Поэтому для оценки скорости автомобиля в АБС используют те или иные косвенные методы, в основном основанные на запоминании частоты вращения колес в определенные периоды времени. Способ решения данной задачи и последующая обработка получаемого сигнала являются факторами, существенно влияющими на алгоритм АБС.
Известно очень большое число самых различных алгоритмов АБС, каждый из которых имеет свои преимущества и недостатки. Однако по большинству показателей в настоящее время предпочтение отдается алгоритмам, основанным на сопоставлении реальной частоты вращения колеса и так называемой опорной частоты вращения, рассчитываемой в каждый момент времени системой управления [22].
В большинстве современных АБС изменение давления в исполнительных устройствах тормозных систем организовано по трехфазовому циклу. При таком цикле наряду с процессами увеличения или уменьшения давления в цилиндрах (или камерах) тормозного привода предусмотрена также фаза (называемая «отсечкой») поддержания в них постоянного давления. В течение этой фазы рабочая полость цилиндров (или тормозных камер) отсоединена как от источника давления, так и от атмосферы (при пневмоприводе тормозных механизмов) или от полости слива (при гидроприводе тормозных механизмов).
Благодаря высокой чувствительности системы управления процесс поддержания ею требуемого тормозного усилия обеспечивается за счет непрерывного повторения циклов регулирования давления. Частота следования этих циклов составляет 5 — 10 Гц. При этих условиях наличие фазы «отсечки» позволяет существенно уменьшить расход сжатого воздуха или снизить подачу гидронасоса.
На первом этапе применения АБС выявились их серьезные недостатки, основной из которых — недостаточная надежность [38]. В результате последующей доработки АБС эти недостатки были устранены, и в настоящее время антиблокировочные системы получают все большее распространение. Однако ввиду относительно высокой стоимости этих систем они в основном используются на магистральных многоосных автопоездах. Для легковых автомобилей массового производства АБС пока что являются слишком дорогим оборудованием.
Рис. 81. Изменение скорости vа, w и дw/dt и давления Р при работе антиблокировочной системы:
1 — частота вращения колеса, пропорциональная скорости автомобиля; 2 — частота вращения колеса при «идеальном» режиме торможения; 3 — фактическая частота вращения колеса
В качестве примера реализа ции АБС на базе аналоговой схемотехники рассмотрим принцип действия системы такого типа, разработанной для автомобилей с пневмоприводом тормозных механизмов. Система управления действует по трехфазному циклу, а ее алгоритм основан на сопоставлении . «опорного» сигнала с сигналом, определяющим фактическую частоту вращения затормаживаемого колеса (А. с. 553142, СССР, МК№ В 60 Т 8/08). Рассмотрим принцип действия системы управления (рис. 80). Будем считать, что торможение автомобиля происходит на скользкой дороге, вследствие чего в процессе торможения частота вращения затормаживаемого колеса снижается быстрее, чем уменьшается скорость автомобиля иа
(рис. 81). На рис. 81 t{ — время начала торможения, a tz — время, при котором разность сигналов, определяемых кривыми 1 и 5, достигнет заданной величины. В момент времени tz тормозная камера отключается от источника давления и одновременно соединяется с атмосферой, что обеспечивает перевод системы регулирования в фазу «сброс» давления. Падение давления Р будет продолжаться до тех пор, пока вследствие уменьшения тормозного момента не прекратится замедление колеса.
В этот момент времени (t=t3) произойдет изменение знака производной dwK/dt , в результате чего выработается сигнал для прекращения снижения давления в тормозной камере путем перевода системы регулирования в режим «отсечка».
Тормозная система обладает определенной инерционностью, поэтому замедление колеса несколько отстает по времени от падения давления в тормозной камере. В результате к моменту, когда прекращается замедление колеса, давление в тормозной камере успевает снизиться в большей степени, чем это было бы необходимо в случае высокого быстродействия тормозной системы. Вследствие этого в период действия фазы «отсечка» будет иметь место разгон колеса. Когда в процессе этого Разгона при t=t4 ускорение колеса и, следовательно, производная dwK/dt достигнут максимума, это будет означать, что сцепление колеса с дорогой восстановилось, в связи с чем следует увеличить тормозной момент. Исходя из этого, система управления подает команду к переходу от фазы «отсечка» к фазе «увеличение» давления.
23. Режим работы задатчика
|
Состояние затормаживаемого колеса |
Режим работы ЗД |
Напряжение на входах А и Б задатчика |
UЗД |
Скорость изменения напряжения на входе эадатчика dUЗд/dt. В/с |
|
|
UА |
UБ |
||||
|
Не блокируется |
Слежение |
Н |
Н |
0,7Uпчн |
<3,5 |
|
Замедление |
Память |
В |
Постоянное, |
>3,5 |
|
|
равное U3до |
|||||
|
Разгон |
Перезапись |
В |
Н |
0,7 Un4H |
Любая |
После этого весь описанный процесс работы системы будет многократно повторяться, причем сигнал, определяющий частоту вращения колеса, в каждом новом цикле будет сравниваться с откорректированным для этого цикла «опорным» сигналом.
Рис. 82. Изменение давления в тормозной камере и электрических сигналов элементов антиблокировочной системы в процессе торможения автомобиля:
I — слежение; II — память; III — перепись; IV — сброс давления: V — отсечка; Uд
= — k dw/dt
В случае реализации «идеального» управления процессом торможения, во время которого поддерживалась бы постоянной величина s=sKp, характер изменения частоты вращения соответствовал бы кривой 2. Чем меньше отличаются кривые 2 и 3, тем совершеннее работа АБС.
Основным элементом АБС является задатчик ЗД «опорного» уровня скорости, с которым сопоставляется фактическая частота вращения колеса. Этот задатчик выполняет функции элемента памяти. В зависимости от сигналов, поступающих через резисторы Rl — R4 (см. рис. 80), на его входы, он работает в одном из трех режимов, указанных в табл. 23.
Приведенное в табл. 23 соотношение между напряжением Uпчн
на выходе ПЧН и напряжением Uзд на выходе задатчика, а также темп изменения напряжения Uзд в режиме слежения, исключают возможность уменьшения напряжения Uпчн
ниже значения U зд в процессе торможения автомобиля, происходящего без блокировки колес, даже при максимально возможной его эффективности (замедление до 5 м/с2). Однако если в процессе торможения автомобиля появится тенденция к блокировке колеса, то частота его вращения резко уменьшится и задатчик не успеет «отследить» изменение напряжения Uпчн. В результате этого будет иметь место соотношение Uзд>Uпчн.
Вследствие этого в момент времени tz напряжение, подводимое от выхода 4 задатчика к неинвертирующему входу 1 компара тора скорости, окажется выше напряжения, подводимого к его инвертирующему входу 2 от выхода ПЧН. В результате на выходе 3 компаратора скорости и, следовательно, на входе Б задатчика появится напряжение высокого уровня, под действием которого задат-чик перейдет в режим памяти. При этом напряжение на выходе задатчика установится равным значению Uздо, которое на рис. 82 соответствует времени tz. После появления напряжения высокого уровня на выходе 3 компаратора скорости через усилители УСб и Уотс (см. рис. 80) вырабатывается команда включения электромагнитов ЭМсб и ЗМОТС
управления модуляторами, осуществляющими сброс давления и «отсечку». В результате снижения при этом давления Р в тормозной камере (см. рис. 82) уменьшится замедление колеса и, как следствие, снизится уровень положительного напряжения Uд на выходе дифференциатора. Когда замедление колеса прекратится и начнется его разгон, напряжение Uд изменит свой знак, т. е. станет отрицательным. В результате этого будет приведен в действие элемент Этах
обнаружения максимума ускорения (см. рис. 80).
Этот элемент выполнен таким образом, что напряжение на его выходе имеет высокий уровень только при одновременном соблюдении двух условий:
напряжение на входе элемента должно быть отрицательным;
уровень отрицательного напряжения на сигнальном входе 1 элемента должен не меняться или возрастать. В случае же его уменьшения напряжение на выходе 4 элемента падает до низкого уровня.
Для четкой фиксации момента изменения полярности напряжения на выходе дифференциатора используется пороговое устройство ПУ дифференциатора, которое преобразует плавно изменяющееся выходное напряжение дифференциатора в сигнал цпу прямоугольной формы (см. рис. 82, штриховая линия). Данный сигнал подводится к блокирующему входу 2 элемента обнаружения максимума (см. рис. 80), благодаря чему появление высокого уровня напряжения на выходе 4 этого элемента может иметь место только в периоды, когда напряжение на выходе порогового устройства ПУ имеет отрицательную полярность, т. е. в периоды разгона колеса.
Соединение сигнального входа 1 элемента обнаружения максимума с выходом дифференциатора обеспечивает получение напряжения высокого уровня на выходе элемента только в периоды, когда имеет место увеличение ускорения колеса. На рис. 81 этот период соответствует интервалу времени, ограниченному точками t3
и t4, а на рис. 82 — участкам, ограниченным точками t3 — t4, t6 — t7, t9 — t10.
За счет соединения выхода элемента обнаружения максимума с входом А задатчика (см. рис. 80) одновременно с появлением высокого уровня напряжения на выходе 4 элемента такое же напряжение подводится к входу А задатчика. Вследствие этого за-датчик переводится в режим «перепись».
Кроме того, благодаря соединению выхода элемента обнаружения максимума с инвертирующим входом 2 компаратора скорости обеспечивается перевод этого компаратора в режим с низким уровнем выходного напряжения.
Последнее приводит к выключению усилителя Усб электромагнита ЭМС6 модулятора, управляющего выпуском воздуха из тормозной сервокамеры, т. е. прекращению «сброса» давления. Но электромагнит ЭМОТС модулятора «отсечки» при этом продолжает оставаться включенным, поскольку к входу его усилителя подводится напряжение высокого уровня от выхода элемента обнаружения максимума.
Отключение электромагнита ЭМОТС модулятора «отсечки» от источника питания происходит лишь после того, как вследствие уменьшения ускорения колеса (точки t4, t7, t10) напряжение Uд на выходе дифференциатора начинает уменьшаться (см. рис. 82), что приводит к уменьшению до нуля напряжения на выходе элемента обнаружения максимума.
Далее весь цикл регулирования давления в тормозной системе многократно повторяется.
Опорным сигналом для системы управления является напряжение Uздо, фиксируемое на выходе задатчика в периоды «памяти». В каждом новом цикле работы системы уровень запоминаемого напряжения Uздо уменьшается по сравнению с его уровнем в предшествующем цикле. Иными словами, «опорный» сигнал фиксируемый в точках t2, t5, U, все время изменяется соответственно скорости движения автомобиля, что и требуется для функционирования системы управления.
Если в процессе торможения автомобиля на скользкой дороге имеет место особо интенсивное снижение частоты вращения колеса, то это вызывает соответствующее увеличение напряжения положительной полярности на выходе дифференциатора. Подключение выхода дифференциатора к неинвертирующему входу 1 компаратора скорости приводит к повышению уровня напряжения на данном входе компаратора, вследствие чего напряжение высокого уровня на его выходе появляется раньше, чем вследствие замедления колеса напряжение на выходе ПЧН снизится до 70 % его первоначальной величины.
Благодаря этому сигнал на «сброс» давления будет выдан с опережением, что и требуется для повышения эффективности действия АБС.
Выход компаратора скорости соединен с входом 3 элемента обнаружения максимума (см. рис. 80). Особенность этой связи заключается в том, что при наличии напряжения на входе 3 элемента приводится в действие его блок запоминания данного напряжения, которое является разрешающим для действия элемента. Это запоминание является относительно непродолжительным, поэтому для создания возможности появления напряжения высокого уровня на выходе элемента обнаружения максимума (при наличии соответствующего уровня напряжения на его сигнальном входе 1) необходимо, чтобы периодически к его разрешающему входу 3 подводилось напряжение от выхода компаратора скорости.
Данное условие окажется выполненным при торможении автомобиля на скользкой дороге, когда вследствие резкого уменьшения частоты вращения колес будет иметь место включение компаратора скорости с появлением на его выходе напряжения высокого уровня (в периоды «памяти»).
По-иному действует система управления в случае, например, движения автомобиля на спуске с увеличением его скорости. При этом водитель может начать подтормаживать автомобиль путем включения тормозов.
В процессе разгона автомобиля дифференциатор вырабатывает напряжение отрицательной полярности, которое является сигналом для включения элемента обнаружения максимума. Если при этом не предотвратить включение данного элемента, то будет реализован режим «отсечка», т. е. самопроизвольно прекратится торможение автомобиля, что совершенно недопустимо.
Рис. 83. Изменение угловой скорости W1,2 и W3, скорости иа, давлений Р1,2
и Ра при работе антиблокировочной системы тягача
Такое действие АБС, однако, оказывается невозможным, поскольку в процессе разгона автомобиля Uпчн>UЗД, т. е. компаратор скорости не срабатывает и вследствие этого напряжение к разрешающему входу 3 элемента обнаружения максимума не подводится.
Очень важным элементом АБС является блок контроля ее исправности. В его задачу входит автоматическое выключение электромагнитов модуляторов сброса и отсечки при появлении неисправности в системе управления. Одновременно должна быть приведена в действие сигнализация, оповещающая водителя о наличии неисправности в АБС.
На входы блока контроля подается напряжение от выходов ПЧН и задатчика. Сигналом неисправности АБС являются нарушение нормального соотношения между Uпчн
и Uзд в течение периода времени более 1 с.
В этом случае на выходе блока контроля, во-первых, вырабатываются команды выключения усилителей управления модулято-рами «сброса» и отсечки и, во-вторых, подается команда на включение сигнализатора отказа АБС (например, аварийной лампы).
В последнее время появилось большое число сообщений о создании и серийном производстве различных антиблокировочных тормозных систем на базе микропроцессорных комплектов. Такой путь создания антиблокировочных систем является вполне оправданным, поскольку применение микропроцессоров позволяет наилучшим образом осуществлять оптимальное управление тормозами с учетом большого числа факторов, влияющих на процесс торможения автомобилей [11].
Можно, правда, отметить, что микропроцессорные АБС ввиду относительно высокой их стоимости пока что в основном применяются на большегрузных автомобилях и тягачах.
В качестве примера такого применения можно указать на микропроцессорную АБС, которой оборудуются трехосные полуприцепы большой грузоподъемности с пневмоприводом тормозных механизмов. Эта система содержит два канала управления тормозными механизмами, один из которых используется для регулирования давления P1,2 в тормозных камерах первой и второй осей, а второй канал осуществляет регулирование давления Р3 в камерах третьей оси.
Сравнение характеристик изменения угловой скорости wK1,2 и wкз колес первой, второй и третьей осей и скорости автомобиля va (рис. 83) показывает, что применение АБС обеспечивает незначительное расхождение между ними в процессе торможения. Это свидетельствует об эффективности действия АБС.
У автомобилей, содержащих АБС, при выходе из строя тормозных систем сохраняется обычный привод тормозных механизмов. Опыт эксплуатации автомобилей с АБС показал, что при наличии такой системы у водителя вырабатываются новые навыки управления процессом торможения. Поэтому в случае внезапного отказа АБС водитель может не обеспечить необходимой эффективности торможения автомобиля. Вследствие этого к надежности АБС и в том числе к надежности электронного блока предъявляют особо жесткие требования.
Это особенно важно для микропроцессорных АБС. При разработке схемотехники электронных блоков таких систем принимают специальные меры для предупреждения сбоев в их работе. Достигают этого как вследствие аппаратурного обеспечения, так и применением специальных -помехоустойчивых программ. Данные решения частично напоминают схемотехнику элементов защиты от неправильного функционирования микропроцессорных систем управления ГМП.