АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Системы автоматического управления сцеплением получили наиболее широкое распространение в 50 — 60-х годах. Их особенностью являлось применение сцеплений специальных конструкций, которые легче поддавались автоматизации по сравнению с обычными фрикционными сцеплениями.
Рис. 55. Схема системы автоматического управления сцеплением «Драйв Матик»:
а — педаль управления дроссельной заслонкой отпущена, сцепление выключено; б — педаль управления дроссельной заслонкой нажата, сцепление выключено; в — педаль управления дроссельной заслонкой нажата, сцепление включено; 1 — вакуумная сервокамера; 2 — полость сервокамеры; 3 — мембрана; 4 — шток; 5 — рычаг; 6 — трос педали сцепления; 7 — педаль привода сцепления; 8 — педаль управления дроссельной заслонкой; 9 — трос педали привода дроссельной заслонки; 10 — рукоятка переключения передач; 11 — рычаг переключения передач; 12 — датчик скорости; 13 — электронный блок; 14 — потенциометр, id — отверстие для впуска воздуха; 16 и 26 — электромагниты; 17 — шланг; 18 и 20 — элементы золотника; 19 — золотник; 21 — полость золотника; 22 и 23 — каналы; 24 — воздушный клапан; 25 — вакуумный клапан; 27 — ресивер; 28 — обратный клапан; 29 — впускной коллектор двигателя; 30 — шланг
Широкое применение получили центробежные сцепления, а также электромагнитные (фрикционные и из порошковых материалов), имеющие сравнительно простые релейные схемы управления. Недостаток автоматически действующих сцеплений — невозможность использования унифицированного силового агрегата. В конце 70-х годов за счет применения электронных систем оказалось возможным относительно простыми средствами автоматизировать работу обычного фрикционного сцепления. Следует, однако, отметить, что системы автоматизации управления сцеплением пока что носят единичный характер. В качестве примера такой системы можно указать на выпускаемую в ФРГ систему управления «Драйв Матик». Эта система обеспечивает автоматизацию управления обычным фрикционным сцеплением. Ее комплектуют только из навесных узлов, благодаря чему ее применение не связано с изменением конструкции серийных агрегатов автомобиля.
Исполнительным механизмом системы (рис. 55) является вакуумная сервокамера 1 с мембраной 3, шток 4 которой через трос 6 воздействует на педаль 7 привода сцепления, осуществляя регу лирование момента Мс. Кроме того, шток 4 через приводной рычаг 5 связан с первым подвижным элементом 18 кольцевого золотника 19, регулирующего разрежение в полости 2 вакуумной сервокамеры 1. Второй подвижный элемент 20 кольцевого золотника посредством троса 9 соединен с педалью 8 управления дроссельной заслонкой.
В элементах 18 и 20 имеются каналы 22 и 23, которые в зависимости от взаимного расположения элементов либо соединяются между собой, либо разобщаются. При совмещении этих каналов внутренняя полость 21 золотника соединяется с атмосферой, а при разобщении связь указанной полости золотника с атмосферой прерывается. Полость 21 золотника посредством шланга 17 соединяется с полостью 2 сервокамеры 1, поэтому в зависимости от взаимного расположения элементов золотника полость 2 сервокамеры или соединяется или разъединяется с атмосферой.
Соединение полости 2 сервокамеры с атмосферой может осуществляться и через клапан 24, приводимый от электромагнита 16. При включении электромагнита клапан 24 разъединяет полость сервокамеры с атмосферой (соединяемые через отверстия 15), и разрежение в этой полости определяется только действием золотника 19. Если же электромагнит 16 выключен, то независимо от действия золотника в полости 2 сервокамеры устанавливается атмосферное давление.
Клапан 25 при срабатывании электромагнита 26 соединяет полость 2 сервокамеры с ресивером 27, который с помощью шланга 30 через обратный клапан 28 связан с впускным коллектором 29 двигателя. При этом клапан 25 одновременно осуществляет отсоединение полости 2 от остальной части системы регулирования разрежением.
Электронный блок 13 управляет включением и выключением электромагнита 16 в зависимости от скорости движения автомобиля, получая входные сигналы от датчика 12 скорости автомобиля При его движении со скоростями ниже заданной выход блока (вывод K) соединен с массой, а при достижении автомобилем заданной скорости эта связь прерывается С помощью потенциометра 14 электронный блок настраивается на срабатывание при требуемой скорости. Когда водитель прикладывает усилие к рукоятке 10 рычага 11 переключения передач в выключателе S1, встроенном в эту рукоятку, контакты замыкаются на массу. В выключателе S2, расположенном в приводе переключения передач, контакты замыкаются при включении любой из передач. При нейтральном положении коробки передач контакты разомкнуты. С тросом 9 привода дроссельной заслонки связан микровыключатель S3, контакты которого замкнуты только при режиме холостого хода двигателя.
Система « Драйв Матик» действует следующим образом. При установке рычага переключения передач в нейтральное положение и отпущенной педали управления дроссельной заслонкой вследствие размыкания контактов выключателей S1 и S2 электромагниты 16 и 26 оказываются отключенными от источника питания. Вследствие этого клапан 25 отсоединяет полость 2 сервокамеры от ресивера 27, а через открытый воздушный клапан 24 полость 2 сервокамеры соединяется с атмосферой, в результате сцепление включается.
Как только водитель при неподвижном автомобиле включает какую-либо из передач, создается цепь питания электромагнитов 16 и 26 через замкнувшиеся контакты выключателя S2 и замкнутую выходную цепь электронного блока. В результате срабатывают оба электромагнита, и воздушный клапан 24 разъединяет полость 2 сервокамеры с атмосферой, а вакуумный клапан 25 соединяет ее с ресивером 27. Это обеспечивает полное выключение сцепления.
При нажатии водителем на педаль 8 управления дроссельной заслонкой размыкаются контакты микровыключателя S3, в результате чего цепь питания электромагнита 26 разрывается и вакуумный клапан 25 закрывается, разъединяя полость 2 сервокамеры и ресивер. Поскольку вследствие включения электромагнита 16 воздушный клапан 24 оказывается также закрытым, величина разрежения в полости 2 вакуумной камеры определяется только действием золотника 19, Элемент 18 золотника 19 установлен по отношению к элементу 20 так, что при отпущенной педали о и расположении штока 4 в крайнем левом положении (полное выключение сцепления) каналы 22 и 23 элементов золотника оказываются соединенными между собой. Вследствие этого полость 2 сервокамеры соединяется с атмосферой, что приводит к постепенному уменьшению в ней разрежения и, как следствие, к перемещению штока 4 слева направо. Такое перемещение штока 4 будет продолжаться до тех пор, пока поворот элемента 18 не разобщит каналы 22 и 23. В этом случае связь полости 2 сервокамеры с атмосферой прервется и дальнейшее перемещение штока 4 прекратится.
Элементы золотника располагают таким образом, что при отпущенной педали 8 шток 4 устанавливается в положении I, соответствующем началу передачи сцеплением момента.
При нажатии водителем на педаль 8 вследствие поворота элемента 20 (положение II золотника) вновь произойдет соединение каналов элементов 18 и 20. Это обусловит соединение полости 2 сервокамеры с атмосферой и дальнейшее перемещение штока в направлении включения сцепления. Такое перемещение прекратится, когда шток 4 опять установится в положение III, соответствующее разобщению каналов 22 и 23. Очевидно, что чем на больший угол была открыта дроссельная заслонка, тем дальше в направлении включения сцепления должен переместиться шток 4 для того, чтобы произошло разобщение каналов элементов. Таким образом, в системе «Драйв Матик» момент Мс регулируется в зависимости от угла а открытия дроссельной заслонки. Показатели такой системы управления были рассмотрены выше.
После того, как автомобиль разгонится до скорости, при которой срабатывает электронный блок, вследствие отключения от массы вывода K блока разрывается цепь питания электромагнита 16. Это обеспечивает открытие воздушного клапана 24, и полость 2 сервокамеры соединяется с атмосферой независимо от взаимного положения элементов золотника. Диаметр отверстия 15 выбирают из условия обеспечения плавного включения сцепления в процессе его блокировки вследствие открытия воздушного клапана.
Принудительная блокировка сцепления после разгона автомобиля до заданной скорости предотвращает повышенное изнашивание выжимного подшипника сцепления при движении автомобиля с малыми углами открытия дроссельной заслонки.
Система «Драйв Матик» обеспечивает только плавное увеличение момента Мс по мере увеличения угла открытия заслонки. Если же водитель уменьшает угол открытия дроссельной заслонки, то момент Мс не снижается и остается равным тому значению, которое было достигнуто ранее при наибольшем угле открытия заслонки. Для того чтобы уменьшить момент Мс до значения, соответствующего меньшему углу открытия дроссельной заслонки, необходимо вначале полностью отпустить педаль 8 для того, чтобы замкнулись контакты микровыключателя S3 и полость 2 сервокамеры соединилась с ресивером, а затем перевести педаль 8 в требуемое положение. Данная особенность системы управления является положительной с точки зрения уменьшения опасности работы сцепления с длительным пробуксовыванием. Однако при этом усложняется маневрирование при движении автомобиля с низкими скоростями, а также уменьшается предельный угол подъема, на котором возможно трогание автомобиля с места.
Принудительное выключение сцепления в процессе переклю чения передач независимо от частоты вращения коленчатого вала и скорости движения автомобиля обеспечивается при замыкании контактов включателя S1. В этом случае включается электромагнит 26, благодаря чему через открывшийся вакуумный клапан 25 происходит соединение полости 2 сервокамеры с ресивером и, как следствие, полное выключение сцепления.
Система «Драйв Матик» обеспечивает все требуемые режимы работы автоматического сцепления. Но для этого она помимо сервокамеры и регулирующего золотника содержит значительное количество дополнительной управляющей аппаратуры (два клапана с электромагнитным приводом, три выключателя, датчик скорости, электронный блок управления блокировкой сцепления). Следует, однако, учесть, что электронный блок по функциональному назначению представляет собой один из вариантов частотного компаратора, т. е. степень его сложности невелика и примерно соответствует сложности электронного блока управления экономайзером принудительного холостого хода, выпускаемого промышленностью для моделей автомобилей отечественного производства.
Автоматический электровакуумный привод сцепления
Электровакуумный привод сцепления (ЭПС) представляет собой универсальную систему автоматического управления стандартным фрикционным сцеплением автомобилей с двигателями, имеющими рабочий объем 0,65 — 2,5 л, которая изменяет момент трения Мс сцепления в зависимости от частоты вращения пк
коленчатого вала. Он комплектуется только из навесных узлов, не имеющих механической связи с другими агрегатами автомобиля. Благодаря этому оборудование автомобилей ЭПС не требует изменения конструкции их агрегатов.
Основными узлами ЭПС являются вакуумная сервокамера (рис. 56) и электронный блок автоматики, регулирующий силу тока в обмотке электромагнита 2 сервокамеры. Сцепление включается и выключается в результате перемещения поршня 6 (рис. 57) и связанного с ним штока 3 сервокамеры. Если, например, поршень 6 втягивается внутрь сервокамеры, то шток 3, воздействуя на рычаг 2, перемещает слева направо поршень главного гидроцилиндра 22 сервокамеры. Это вызывает перемещение поршня рабочего гидроцилиндра 19 (слева направо на рис. 57), вследствие чего шток 15, нажимая на рычаг привода сцепления, передвигает выжимной подшипник сцепления, выключая его через пяту сцепления. При движении поршня 6 в обратном направлении сцепление включается.
Слева от поршня 6 расположена полость 5, постоянно соединенная с атмосферой, а справа от поршня находится полость 9 регулируемого давления, в которой давление может меняться от атмосферного до разрежения 60 — 70 кПа. Чем выше разрежение в полости 9, тем большая разность сил действует на стенки поршня 6, в результате чего возрастает сила, стремящаяся переместить поршень внутрь сервокамеры. Под ее действием через приводные узлы сцепления сжимаются нажимные пружины, вследствие чего уменьшается прижатие нажимного диска к ведомому и соответственно уменьшается момент, передаваемый сцеплением. По мере уменьшения разрежения в полости 9 снижается сила, действующая на поршень 6. В результате этого уменьшается усилие, действующее на нажимные пружины сцепления, что приводит к ослаблению силы прижатия нажимного диска к ведомому.
При этом обеспечивается возрастание момента, передаваемого сцеплением.
Разрежение в полости 9 регулируется с помощью клапана 31, на который с одной стороны действует пружина 32, а с другой стороны — толкатель 28. В свою очередь, на толкатель действует, во-первых, усилие последовательно установленных пружин 4 и 8, которое стремится передвинуть его слева направо, и, во-вторых, сила Fэм, развиваемая электромагнитом 12, направленная навстречу усилию указанных пружин. Пружина 8 создает гораздо меньшее усилие по сравнению с пружиной 4, поэтому она полностью сжимается после втягивания поршня 6 на 20 — 25 % полного его перемещения, в пределах которого момент Мс сохраняет максимальное значение. Так как пружина 8 не влияет на характеристики сервокамеры, то при рассмотрении принципа действия ЭПС будет приниматься во внимание только действие пружины 4. Назначение пружины 8 будет указано ниже.
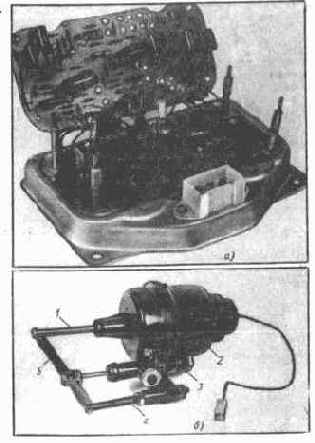
Рис. 56. Узлы электровакуумного привода сцепления:
а — электронный блок управления; б — сервокамера; 1 — шток; 1 — электромагнит; 3 — главный гидроцилиндр; 4 — регулируемая опора рычага; 5 — рычаг.
Электромагнит 12 в отличие от электромагнитов с втягивающимся якорем обычного типа выполнен без центрального неподвижного сердечника. В результате по мере втягивания якоря внутрь полости электромагнита развиваемое им тяговое усилие не возрастает, как у обычных электромагнитов (рис. 58, кривые 1 и 2), а уменьшается (кривые 3 — 8). Тем самым за счет регулирования силы тока в обмотке электромагнита создается возможность перемещать его якорь в любое положение, которое является устойчивым для данной силы тока. Такой вид тяговых характеристик электромагнита является необходимым условием для функционирования ЭПС.
Если усилие FSM превысит? усилие пружины 4 (см. рис. 57), то толкатель 28 сместится в левое положение и его подвижное седло 30 отойдет от клапана 31. В результате этого клапан 31 под действием пружины 32 переместится в крайнее левое положение и прижмется к неподвижному седлу 29 (рис. 57, Л). В результате полость 9 через обратный клапан 13 соединится с впускным коллектором 14 двигателя, благодаря чему в данной полости возникнет разрежение, обеспечивающее втягивание поршня 6 внутрь сервокамеры, и, следовательно, уменьшится момент Мс. Если же усилие пружины 4 станет больше силы FSM то подвижное седло, во-первых, закроет центральное отверстие в клапане 31 и тем самым разъединит полость 9 с впускным коллектором двигателя, и, во-вторых, отодвинет клапан от неподвижного седла 29, благодаря чему полость 9 через отверстие 33 в корпусе 34 клапана соединится с атмосферой (рис. 57,5). В результате произойдет уменьшение разрежения в полости 9, вследствие чего, как отмечалось выше, увеличится момент, передаваемый через сцепление.
Усилие Fпр, пружины 4 зависит от положения поршня б, возрастая по мере его втягивания внутрь сервокамеры, а сила FSM, развиваемая электромагнитом, — от силы тока, проходящего через его обмотку. Если при каком-то положении поршня сила Рэм. будет больше усилия пружины ]4, то поршень будет втягиваться внутрь сервокамеры. Но в этом случае из-за сжатия пружины 4 возрастет развиваемое ею усилие, которое при определенном положении поршня становится равным усилию электромагнита. В результате толкатель 28 установится в таком положении, при котором его подвижное седло 30 только закроет центральное отверстие в клапане 31, не отодвигая сам клапан от неподвижного седла 29. В таком положении клапана 31 (рис. 57, Б) будет обеспечено отсоединение полости 9 как от впускного коллектора двигателя, так и от атмосферы, благодаря чему в данной полости установится постоянное разрежение, и дальнейшее перемещение поршня прекратится.
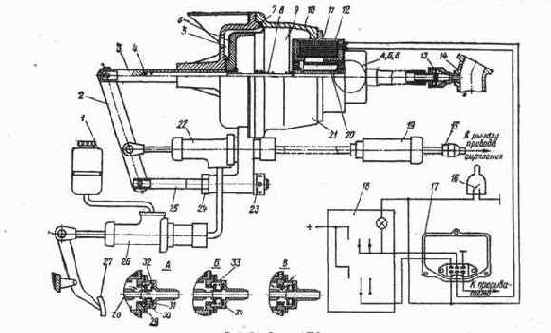
Рис. 57. Схема ЭПС:
1 — бачок системы гидропривода; 2 — рычаг сервокамеры; 3 — шток; 4 и S — пружины; 5 — полость атмосферного давления; 6 — поршень; 7 — мембрана; S — полость регулируемого давления; 10 — корпус сервокамеры; 11 — обмотка электромагнита; 12 — электромагнит; 13 — обратный клапан; 14 — впускной коллектор двигателя; 15 — шток рабочего гидроцилиндра; 16 — выключатель сцепления; 17 — элек тронный блок управления ЭПС; 18 — щиток управления; 19 — рабочий гидроцнлиндр: 20 — якорь электромагнита; 21 — сервокамера; 22 — главный гидроцилиндр сервокамеры; 23 я 24 — гайки; 2S — опора рычага; 26 — главный гидроцилиндр дублера привода сцепления; 27 — педаль дублера привода сцепления; 28 — толкатель; 29 — неподвижное седло; 30 — подвижное седло; 31 — клапан; 32 — пружина; 33 — отверстие для впуска воздуха; 34 — корпус клапана
Если же в процессе работы сервокамеры при каком-то положении поршня усилие Fпр, пружины 4 превысит силу Fэм, то в результате соединения полости сервокамеры с атмосферой это приведет к перемещению поршня 6 в направлении его выхода из сервокамеры. Но в результате уменьшится усилие пружины 4 и, когда оно сравняется с силой FSM, клапан 31 соприкоснется как с подвижным, так и неподвижным седлом. Полость 9 сервокамеры будет отсоединена как от источника разрежения, так и от атмосферы, в ней установится постоянное разрежение и положение поршня 6 не будет изменяться.
Данное положение клапана 31 и толкателя 28 соответствует установившемуся режиму работы сервокамеры. Практически же в процессе ее работы поршень колеблется с небольшой амплитудой и с высокой частотой относительно установившегося его положения. При этом амплитуда колебаний поршня постепенно уменьшается и в случае постоянства силы FЭM, спустя некоторое время, поршень занимает установившееся положение.
Чем выше сила тока Iэм, проходящего через обмотку электромагнита, тем при большем сжатии пружины 4 обеспечивается равенство развиваемого ею усилия Fпр и силы FSM электромагнита. Для обеспечения увеличения усилия пружины 4 поршень 6 должен дальше втянуться внутрь камеры, вследствие чего уменьшается момент Мс. Таким образом, рассматриваемый привод представляет собой следящую систему, в которой элементом обратной связи является пружина 4.
В исходном состоянии ЭПС, соответствующем силе тока Iэм
=0, поршень гидроцилиндра 22 занимает крайнее левое положение, которое не зависит от длины опоры 25 рычага 2. Поэтому с увеличением длины опоры 25 при перемещении влево ее конца шток 3 (и поршень 6) будут втягиваться внутрь сервокамеры. В результате уменьшится полный ход штока 3, так как конечное его положение, соответствующее упору поршня 6 в корпус электромагнита, не изменится. Благодаря этому уменьшается зазор между нажимным и ведомым дисками сцепления в конечном положении штока 3, и для обеспечения начала трогания автомобиля с места нажимной диск должен от своего конечного положения пройти меньшее расстояние. Тем самым достигается начало трогания автомобиля с места при большей силе тока Iэм, чему соответствует меньшее значение пк.
Рис. 58. Зависимости тягового усилия Fэм
от перемещения l якоря и силы тока Iэм в об-мотке электромагнита с втягивающимся якорем: 1 и 2 — с центральным неподвижным сердечником
Изменение исходного положения штока 3 вследствие его перемещения внутрь сервокамеры вызывает сжатие пружины 8. Однако так как пружина 8 рассчитана на небольшое усилие и имеет малую жесткость, ее усилия при регулировании исходного положения штока 3 будут изменяться незначительно. Вследствие этого общее усилие, создаваемое пружинами 4 и 8, при работе ЭПС будет практически зависеть только от характеристики пружины 4. В результате обеспечивается примерное постоянство изменения момента Мс
при перемещении штока 3. Для изменения длины опоры 25 нужно отвернуть гайку 24, а затем, вращая гайку 23, переместить опору в требуемое положение и зафиксировать ее, затянув гайку 24.
Таким образом, в результате изменения положения опоры 25 осуществляется изменение частоты вращения коленчатого вала, соответствующее началу трогания автомобиля с места, а для получения требуемой зависимости Mc=f(nK) достаточно обеспечить с помощью электронной системы управления необходимый закон изменения силы тока Iэм в обмотке электромагнита от частоты вращения пк.
Темп включения сцепления определяется скоростью заполнения полости 9 воздухом, поступающим в нее через отверстия 33 в корпусе 34 при установке клапана 31 в положение, согласно рис. 57,5. Диаметр отверстий 33 выбран таким, что при полностью открытом клапане 31 обеспечивается требуемое быстрое включение сцепления после окончания процесса переключения передач и вместе с тем чрезмерно не увеличиваются нагрузки на узлы трансмиссии.
Принудительное выключение сцепления независимо от частоты вращения коленчатого вала выполняется с помощью входящего в состав ЭПС выключателя 16, установленного в головке рычага переключения передач. Контакты данного выключателя замыкаются, когда водитель прикладывает усилие к рычагу переключения передач. В результате этого к обмотке электромагнита подводится полное напряжение источника питания, что обеспечивает прохождение через нее тока Iэм
=Iэм mах=3,5-4 А.
Законы управления ЭПС, реализуемые с помощью электронной системы управления. Выше было установлено, что закон изменения момента Мс определяется зависимостью силы тока Iэм в обмотке электромагнита сервокамеры от частоты вращения пк коленчатого вала.
Для обеспечения требуемых режимов работы сцепления при различных условиях эксплуатации автомобиля системой управления ЭПС предусмотрена возможность реализации двух режимов работы системы автоматического управления сцеплением — основного и вспомогательного.
Различие между этими режимами заключается в том, что при вспомогательном режиме зависимость Iэм =f(nк) по сравнению с аналогичной зависимостью для основного режима смещена в зону более высоких частот пк, как это показано штриховыми линиями на рис. 59. Благодаря этому при вспомогательном режиме зависимость Mc=f(nK) также смещается в зону более высоких пк, что требуется в случае эксплуатации автомобиля в уо ловиях низких отрицательных температур с плохо прогретым двигателем или при движении автомобиля в тяжелых дорожных условиях (с большим сопротивлением движению).
Рис. 59. Зависимости силы тока Iэм
в обмотке электромагнита ЭПС от частоты вращения пк:
1 — 4 — основной режим работы; 5 — доблокировка, основной режим; 6 — 9 — вспомогательный режим работы; 10 — доблокировка, вспомогательный режим
Для перехода от основного режима к вспомогательному водитель должен переключить выключатель на щитке управления 18 (см. рис. 57).
Основной режим работы системы управления. На основном режиме в диапазоне частот вращения пк от 800 мин-1 (режим холостого хода двигателя) до 2200 мин-1 сила тока Iэм
монотонно уменьшается от 2,2 до 1,2 А (рис. 59, кривая 1).
Вакуумная сервокамера ЭПС спроектирована таким образом, что при прохождении через обмотку ее электромагнита тока силой 2,1 — 2,2 А она обеспечивает полное выключение сцепления, а при силе тока 1,8 — 2 А (соответствующей гск =1100-1300 мин-1) сцепление передает момент Мс, достаточный для трогания автомобиля с места на горизонтальном участке пути. По мере уменьшения силы тока Iэм происходит увеличение момента Мс
и при силе тока 1,2 А (nк = 2200 мин-1), сцепление может передать момент Мс, несколько превышающий максимальный крутящий момент двигателя.
При частоте вращения nк>nб
= 2200 мин-1 происходит уменьшение силы тока от 1,2 А почти до нуля (линия 2), обеспечивающее увеличение момента трения сцепления до максимального значения Мс max, благодаря чему гарантируется блокировка сцепления. Указанное снижение силы тока происходит1 не мгновенно, а в течение примерно 1,5 с, что исключает возможность появления пиковых нагрузок в трансмиссии автомобиля даже при «несогласованной» характеристике Mc=f(nK).
После того, как реализуется режим блокировки сцепления, сила тока Iэм
остается близкой к нулю (линия 3) до тех пор, пока частота вращения пк
не уменьшится до значения ярб=1100 мин-1. При такой частоте вращения сила тока (линия 4) скачкообразно увеличивается до 2 А (режим разблокировки сцепления). Далее сила тока Iэм
в зависимости от частоты вращения пк изменяется по кривой 1 характеристики Iэм = f(nK).
Таким образом, если при движении автомобиля частота вращения коленчатого вала двигателя хотя бы кратковременно превысила 2200 мин-1 и вследствие этого произошла блокировка сцепления, то в дальнейшем сцепление останется заблокированным до тех пор, пока частота вращения коленчатого вала не станет ниже 1100 мин-1. Благодаря этому, как указывалось выше, значительно уменьшается опасность работы сцепления с пробуксовыванием в случае движения автомобиля с низкими скоростями, т. е. исключается основной недостаток большинства известных систем автоматизации управления сцеплением.
Рис. 60. Структурная схема системы управления ЭПС
При частотах вращения пк, меньших nб, имеется возможность подачи команды на включение блокировки сцепления. Такой режим (А. с. 929471, СССР, МКИ3 В 60 К 41/02) реализуется в случае, если во время переключения передач частота вращения пк оказывается больше nдб=1500 мин-1 (линия 5). При этом уменьшается опасность длительной работы сцепления с пробуксовыванием, которая могла бы быть в случае движения автомобиля с низкими скоростями при включенных высших передачах. Вместе с тем такое смещение режима блокировки не оказывает влияния на динамику автомобиля при его трогании с места, поскольку низшая передача, на которой начинается разгон автомобиля, включается еще до начала его разгона, чему соответствует условие nк<nдб. Рассмотренный режим называется доблокировкой сцепления. Отметим, что обычно в системах автоматического управления сцеплением такой режим не предусматривается.
Вспомогательный режим работы системы управления. Зависимости Mc=f(nK) для основного и вспомогательного режимов имеют аналогичный вид и отличаются только тем, что для последнего эта зависимость смещена в зону более высоких частот вращения пк. Вследствие этого во вспомогательном режиме сцепление начинает передавать момент, достаточный для трогания автомобиля с места, при частоте вращения пк= 1700-7-1900 мин-1 (см. рис. 59, линия 6), благодаря чему оказывается возможным увеличить частоту вращения коленчатого вала ях. х
в режиме холостого хода двигателя до 1500 — 1600 мин-1 без опасности резкого включения сцепления при трогании автомобиля с места. В результате можно начинать эксплуатацию автомобиля при плохо прогретом двигателе, у которого во избежание его остановки приходится значительно уЬеличивать частоту вращения лх.х. Во вспомогательном режиме точка пересечения зависимостей Mc = f (пк) и M=f(nK) соответствует частоте вращения nK = 2500-2700 мин-1, при которой двигатель развивает момент, близкий к максимальному. В результате обеспечивается улучшение динамики автомобиля. Однако следует иметь в виду, что так как при вспомогательном режиме резко возрастает работа буксования сцепления, данным режимом нужно пользоваться только в течение короткого промежутка времени, во избежание ускоренного изнашивания накладок ведомого элемента сцепления.
Принцип действия электронной системы управления ЭПС, электрическая схема и конструкция электронного блока автоматики. Структурная схема электронной системы управления ЭПС приведена на рис. 60, а ее принципиальная электрическая схема — на рис. 61.
Стабилизатор напряжения. Стабилизатор напряжения СН предназначен для питания постоянным по величине напряжением (10 — 10,2 В) цепей управления электронного блока, и в том числе элементов частотно-аналогового преобразователя ПЧН и операционных усилителей, входящих в состав регулятора тока и узла блокировки сцепления. По схемотехническому решению стабилизатор СН аналогичен стабилизатору напряжения, выполненному по схеме рис. 6. Он поддерживает стабилизированное напряжение по отношению к положительному полюсу источника питания. Поэтому действие элементов СЯ, обеспечивающих стабилизацию его выходного напряжения, в данном разделе не рассматривается. В дополнение к указанным элементам в состав СН входят также элементы защиты цепей управления электронного блока от перенапряжений в бортовой сети и от подключения блока под напряжение обратной полярности.
Рис. 61. Схема электронной системы управления ЭПС
Защита от перенапряжений осуществляется с помощью стабилитрона VD9 типа Д815Ж (см. рис. 61), включенного последовательно с диодом VD10. Опорное напряжение стабилитрона Д815Ж составляет (18±2,7) В, а падение напряжения в диоде VD10 равно ~0,7 В. При повышении напряжения бортовой сети до 16 — 21,4 В происходит пробой стабилитрона VD9 и создается дополнительная нагрузка для цепи питания электронного блока. Благодаря этому предотвращается появление недопустимых напряжений в данной цепи, поскольку они ограничиваются указанным выше уровнем напряжений. Диод VD10 предотвращает выход стабилитрона VD9 из строя при подключении электронного блока под напряжение обратной полярности. Для защиты цепей управления блока используется транзистор VT24 типа КТ501Ж, переход эмиттер — коллектор которого включен между выводом +12 В блока и шиной +Uст, от которой осуществляется питание цепей управления блока.
Рис. 62. Изменение напряжения на входе электронного блока
При правильном включении блока положительный полюс бортовой сети соединяется с эмиттером, а отрицательный (масса) подключается к базе транзистора VT24. Это обеспечивает открытие транзистора VT24, благодаря чему к шине + UCT подводится напряжение, отличающееся от напряжения бортовой сети на величину падения напряжения в переходе эмиттер — коллектор транзистора VT24 (0,Ы-0,15 В). Если же к электронному блоку подводится напряжение обратной полярности, то транзистор VT24 остается закрытым, а пробой его перехода база — эмиттер не может произойти, поскольку допустимое обратное напряжение для данного перехода у транзистора КТ501Ж составляет 20 В.
Частотно-аналоговый преобразователь. При движении автомобиля происходит быстрое изменение частоты вращения коленчатого вала двигателя. При этих условиях нормальная работа ЭПС оказывается возможной лишь при условии обеспечения высокого быстродействия системы управления, в том числе максимального быстродействия преобразования сигнала, поступающего от датчика частоты вращения коленчатого вала, в напряжение постоянного тока, которое далее используется для изменения силы тока в обмотке электромагнита ЭПС. С учетом данного требовайия в электронном блоке применен ПЧН с преобразованием входного сигнала в течение полуцикла.
Рис. 63. Зависимость итых= =f(nк) для ПЧН при работе ЭПС: 1 — в основном режиме; 2 — во вспомогательном режиме
Входным сигналом для ПЧН является напряжение, подводимое от датчика частоты вращения пк
(прерывателя-распределителя) к выводу 1 электронного блока (рис. 61). Входное устройство ПЧН, состоящее из диода VD1, резисторов Rl, R2, R3 и R7, конденсатора С1 и транзистора VT1, преобразует входное напряжение блока в последовательность прямоугольных импульсов (рис. 62), поступающих на коллектор транзистора VTJ. Дальнейшее преобразование последовательности импульсов в напряжение- Uвых
постоянного тока на выходе ПЧН (коллекторе транзистора VT5) осуществляется таким же образом, как было описано при рассмотрении действия ПЧН, выполненного согласно схеме, приведенной на рис. 35. По сравнению с этой схемой в ПЧН системы управления ЭПС имеется лишь дополнительное устройство изменения характеристики преобразователя (УИХ), осуществляющее изменение зависимости Uвых=f(nк) при переключении ЭПС во вспомогательный режим (рис. 63). Такое переключение водитель осуществляет путем перевода переключателя 5 в положение III (см. рис. 61), благодаря чему напряжение от бортовой сети подводится к выводу 6 блока и далее через резистор R37 к базе транзистора VT13. Это обеспечивает открытие данного транзистора, в результате чего при прохождении коллекторного тока через резисторы R32 и R33 создается дополнительное падение напряжения, приводящее к уменьшению напряжения на базе транзистора VT14 и, следовательно, к снижению напряжения Uвых на выходе ПЧН.
При переключении ЭПС во вспомогательный режим необходимо, чтобы в рабочем диапазоне частот вращения nк=1600-2600 мин-1, соответствующих данному режиму, крутизна характеристики UBblK
= f(nK) была примерно такой же, как и в рабочем диапазоне частот вращения пк =1000-2000 мин-1 основного режима работы ЭПС. Напряжение на выходе преобразующей части ПЧН (эмиттеры транзисторов VT9 и VT10) в зоне частот вращения nK =10004-2000 мин-1
изменяется более интенсивно, чем в диапазоне частот вращения пк= 1600-2600 мин-1. Поэтому для получения одинаковой крутизны характеристики UBЫX=f(nK) ПЧН при обоих режимах работы ЭПС в нем применено решение, обеспечивающее во вспомогательном режиме уменьшение падения напряжения в резисторах R32 и R33 по мере увеличения частоты вращения пк. Это достигается вследствие включения транзистора VT13 по схеме генератора тока. Кроме того, в цепь эмиттера транзистора VT13 включен делитель напряжения, состоящий из параллельно соединенных резисторов R35, R39* и резистора R36. К средней точке делителя через резистор R40 подключен эмиттер транзистора VT13, а к одному из выходов делителя — эмиттер транзистора VT12. Данный транзистор включен по схеме эмиттер-ного повторителя, поэтому напряжение на его эмиттере изменяется соответственно напряжению на базе транзистора, которая подключена к указанному выходу преобразующей части ПЧН. По мере повышения частоты вращения коленчатого вала увеличивается напряжение на базе и эмиттере транзистора VTJ2. Соответственно возрастает и напряжение в средней точке делителя, к которой подключен резистор R40. В результате понижается сила тока в цепях базы и коллектора транзистора VT13, благодаря чему достигается требуемое уменьшение падения напряжения в резисторах 1R32 и R33.
С увеличением сопротивления подстроечного резистора R38* повышается напряжение на базе транзистора VT13, что увеличивает силу тока коллектора данного транзистора и, следовательно, уменьшает выходное напряжение ПЧН. При увеличении сопротивления подстроечного резистора R39* изменение напряжения на выходе преобразующей части ПЧН будет сильнее влиять на режим работы транзистора VT13. Поэтому с увеличением сопротивления резистора R39* возрастает крутизна характеристики UВЫХ= =f(nк) во вспомогательном режиме.
Регулятор силы тока. При постоянном напряжении Uвых, подводимом к входу регулятора силы тока РТ. от выхода ПЧН, данный регулятор должен обеспечивать постоянное среднее значение силы тока Iэм
в обмотке электромагнита ЭПС независимо от напряжения бортовой сети автомобиля и сопротивления обмотки электромагнита. Только при выполнении данного требования может быть обеспечена стабильная работа ЭПС. Необходимо также, чтобы среднее значение силы тока Iэм
изменялось в зависимости от пк, причем по мере возрастания частоты вращения сила тока должна уменьшаться.
Регулятор силы тока (А. с. 901096, СССР, МКИ3 В 60 К 41/02) содержит два функциональных узла: элемент управления ЭУ и выходной усилитель УВ. По принципу действия элемент управления относится к устройствам Импульсного регулирования силы тока. Данный элемент РТ по схеме и принципу действия аналогичен РТ, описанному выше (см. рис. 39). Поэтому режимы работы элемента управления не рассматриваются, а описываются только УВ и некоторые особенности «настройки ЭУ.
В периоды, когда напряжение на инвертирующем входе 4 операционного усилителя DA2 (см. рис. 61), входящего в состав ЭУ, выше напряжения на его неинвертирующем входе 5, напряжение на выходе 10 усилителя небольшое (примерно 1,5 В по отношению к шине — Uct). При этом необходимо с помощью выходного транзистора VT23 отключать обмотку электромагнита ЭПС от источника питания, для чего требуется обеспечить выключение транзисторов VT22, VT21 и VT20, входящих совместно с транзистором VT23 в состав выходного усилителя. С этой целью эмиттер транзистора VT20 подключен к средней точке делителя напряжения, образованного резисторами R72 и R73, а база транзистора — к средней точке делителя напряжения, образованного резисторами R66 и R67.
При номинальных значениях сопротивлений резисторов, указанных на рис. 61, напряжение на эмиттере транзистора VT20 оказывается выше напряжения на его базе, вследствие чего транзистор закрыт.
Когда напряжение на неинвертирующем входе 5 усилителя DA2 выше напряжения на его инвертирующем входе 4, на выходе 10 усилителя появляется высокое напряжение (примерно 8,5 В). При подаче данного напряжения на базу транзистора VT20 через делитель (резисторы R6G и R67) транзистор открывается и работает в режиме насыщения. В результате происходит открытие транзисторов VT21, VT22 и VT23, и обмотка электромагнита ЭПС подключается к бортовой сети через резистор R78 (0,4 Ом).
Транзисторы VT22 и VT23 включены по одной из модификаций схемы составного транзистора. При этом падение напряжения на переходе эмиттер — коллектор включенного транзистора VT23 равно около 1 В, т. е. даже при максимально возможной силе тока нагрузки данного транзистора, не превышающей 3 А, рассеиваемая мощность в транзисторе составит не более 3 Вт.
У транзисторов типа КТ837Х, использованного в качестве выходного транзистора VT23, коллектор соединен с корпусом транзистора. С другой стороны, коллектор транзистора VT23 имеет электрическую связь с массой автомобиля. Это позволяет просто решить проблему охлаждения транзистора VT23 путем его установки непосредственно на корпус электронного блока.
Выше уже отмечалось, что при постоянном напряжении UВЫХ РТ обеспечивает постоянное среднее значение тока Iэм независимо от сопротивления обмотки электромагнита. Это сохраняется и при коротком замыкании обмотки электромагнита. Однако в данном случае резко возрастает частота изменения тока Iэм (на 2 — 3 порядка), так как в короткозамкнутой цепи отсутствует индуктивность. Кроме того, увеличивается разница между минимальным и максимальным значениями силы тока в процессе его изменения, которая имеется при открытии и закрытии выходного транзистора VT23.
В результате указанного существенно увеличивается мощность, рассеиваемая на транзисторе VT23. Именно этот режим является определяющим для выбора размеров охлаждающего радиатора для транзистора VT23.
При применении в качестве выходного транзистора типа КТ837Х, у которого допустимое напряжение база — эмиттер равно 15 В, обеспечивается защита всех элементов усилителя от напряжения обратной полярности. В случае такого подключения, несмотря на соединение базы транзистора VT23 с положительным полюсом бортовой сети, переход база — эмиттер транзистора не будет пробит, а инверсное включение транзистора VT22 также не создаст каких-либо аварийных режимов, поскольку в цепь коллектора транзистора VT22 включен резистор R77 с номинальным сопротивлением 1 кОм.
За счет совместного действия ПЧН, элемента управления и выходного усилителя РТ обеспечивается получение характеристик Iэм =f(пк), приведенных на рис. 59. Наклон этих характеристик можно корректировать с помощью подстроечных элементов РТ. При изменении напряжения UВых на выходе ПЧН напряжение на выводе 4 операционного усилителя DA2 будет меняться тем в больших пределах, чем меньше сопротивление подстроечного резистора R44*. В свою очередь, увеличение диапазона изменения напряжения на выводе 4 DA2 приводит к большим изменениям силы тока Iэм при том же диапазоне изменения частот вращения пк. Вследствие этого возрастает крутизна характеристики Iэм =f(nк). Очевидно, что в результате повышения сопротивления подстроечного резистора R44* будет обеспечено уменьшение крутизны этой характеристики.
В случае повышения сопротивления подстроечного резистора R53* для сохранения прежнего уровня напряжения на выводе 5 усилителя DA2 необходимо соответственно уменьшить напряжение, подводимое к резистору R49. Это возможно только при увеличении падения напряжения в измерительном резисторе R78, т. е. при повышении силы тока Iэм. Поэтому повышение сопротивления резистора R53* приводит к смещению зависимости Iэм = =f(nк) в зону более высоких значений пк, а уменьшение сопротивления резистора R53* — в зону меньших nк.
Узел блокировки сцепления. В состав узла блокировки (УБ) сцепления входят:
пороговое устройство ПУ, вырабатывающее при определенных значениях пк команды на осуществление блокировки и разблокировки сцепления;
элемент плавного включения блокировки (ЭПВ), получающий от порогового устройства команду на блокировку сцепления и реализующий ее вследствие плавного уменьшения силы тока в обмотке электромагнита ЭПС до значения, близкого к нулю. Продол-
жительность указанного процесса уменьшения силы тока составляет 1,5 — 2 с;
элемент корректирования включения блокировки (ЭК), изменяющий после переключения передач настройку порогового устройства для включения блокировки сцепления при уменьшенном значении пк.
Пороговое устройство. Пороговое устройство (ПУ) выполнено в виде операционного усилителя DA1 с положительной обратной связью, реализуемой с помощью транзистора VT2 и резисторов R5 и R6 (см. рис.61).
Напряжение к неинвертирующему входу 5 DA1 подводится от выхода ПЧН, а инвертирующий вход 4 подключен к стабилизированному напряжению питания через делитель напряжения, образованный резисторами R11, R12 и R14 *. При частоте вращения коленчатого вала, меньшей значения nб, напряжение Uвых на выходе ПЧН и, следовательно, на входе 5 DA1 меньше напряжения на входе 4. Поэтому операционный усилитель DA1 работает в режиме с низким уровнем напряжения на его выходе 10 (около 1,5 В). Этого напряжения недостаточно для открытия транзистора VT16 вследствие падения напряжения в диоде VD4 и подведения к эмиттеру транзистора VT16 напряжения от выхода ПЧН (через делитель напряжения, образованный резисторами R57 и R58), При выключенном, транзисторе VT16 команда на включение блокировки не подается. В этот период также закрыт и транзистор VT2, что обеспечивает отключение резисторов R5 и R8* от шины — Ucr. После того, как частота вращения пк возрастает до значения пб, при котором напряжение на входе 5 DA1 становится больше напряжения на его входе 4, операционный усилитель скачкообразно переходит в режим, характеризующийся появлением напряжения высокого уровня (около 8,5 В) на его выходе 10. Скачкообразное переключение DA1 обеспечивается тем, что еще в процессе нарастания напряжения на его выходе открывается транзистор VT2, вызывающий уменьшение напряжения на инвертирующем входе 4 усилителя вследствие подключения к шине — Uст резисторов R5 и R8*. Появление высокого напряжения на выходе 10 усилителя является командой на блокировку сцепления.
После перехода усилителя DA1 в режим с высоким уровнем выходного напряжения вследствие уменьшения напряжения на инвертирующем входе 4 обратное переключение усилителя (в режим с низким уровнем выходного напряжения) может произойти лишь после того, как напряжение UВЫК
на выходе ПЧН снизится до значения, равного уменьшенному напряжению на входе 4 усилителя. Для этого частота вращения коленчатого вала должна снизиться до значения nрб, которое меньше частоты вращения гсб. В результате обеспечивается требуемый характер изменения зависимости Мс = f(nK), при котором снижается работа буксования сцепления. С увеличением сопротивления подстроечного резистора R14* повышается напряжение на инвертирующем входе 4 усилителя DA1. В этом случае для переключения усилителя в режим с высоким уровнем его выходного напряжения к входу 5 необходимо подвести от выхода ПЧН более высокое напряжение. Указанное означает, что увеличение сопротивления резистора R14* смещает частоты вращения nб
и nрб в зону более высоких значений пк. Уменьшение сопротивления резистора R14*, наоборот, уменьшает значения nб и nрб.
Уменьшение сопротивления подстроечного резистора R8* приводит к тому, что после открытия транзистора VT2 снижение напряжения на инвертирующем входе 4 усилителя DA1 происходит в большей степени. В результате увеличивается разность частот вращения лб
и прб. Благодаря этому изменением сопротивления подстроечного резистора R8* обеспечивается регулирование режима разблокировки сцепления.
Элемент плавного включения блокировки (ЭПВ). ЭПВ предназначен для преобразования скачкообразного возрастающего напряжения в плавно повышающееся напряжение, управляющее процессом уменьшения силы тока в обмотке электромагнита ЭПС. Для решения этой задачи в элемент входит интегрирующая цепь, состоящая из конденсатора С10 (см. рис. 61), резисторов R54 и R55 и транзистора VT16, образующих генератор тока.
После переключения операционного усилителя DA1 порогового устройства в режим с высоким напряжением на его выходе происходит постепенная зарядка конденсатора СЮ, в ходе которой также постепенно возрастает напряжение, подводимое к базе транзистора VT16. В результате этого обеспечивается плавное увеличение силы тока коллектора транзистора VT16, следствием чего является уменьшение напряжения на неинвертирующем входе 5 операционного усилителя DA2, сопровождающееся соответствующим уменьшением силы тока в обмотке электромагнита. Постоянная времени цепи зарядки конденсатора С10 выбрана такой, что сила тока Iэм
уменьшается от 1,2 — 1,4 А до значения, близкого к нулю, за 1,5 — 2 с, что достаточно для предотвращения излишне резкого включения сцепления после подачи команды на его блокировку.
Элемент корректировки включения блокировки (ЭК). В состав ЭК (см. рис. 61) входят пик-детектор (диод VD3, конденсатор С6 и резистор R27), эмиттерный повторитель (на транзисторе VT5 и резисторах R19 и R24*) и разделительный диод VD2. Элемент приводится в действие от выключателя сцепления SBC, встроенного в головку рычага переключения передач. Пока водитель не воздействует на рычаг, контакты выключателя SBC разомкнуты, и напряжение от эмиттера транзистора VT23 подводится к конденсатору Сб.
Во время работы электронного блока происходят повторяю- щиеся включения и выключения транзистора VT23, причем когда транзистор VT23 выключен, на его эмиттере появляются импульсы напряжения, близкие по величине к напряжению источника питания. От них происходит зарядка конденсаторов С6, в результате чего на эмиттере транзистора VT5, включенного по схеме эмиттер-ного повторителя, имеется напряжение высокого уровня, препятствующее прохождению1 тока через диод VD2. Тем самым при разомкнутых контактах выключателя sbc исключается влияние элемента корректировки на работу порогового устройства.
Однако когда водитель переключает передачи, автоматически замыкаются контакты выключателя sbc, и к конденсатору С6 перестает подводиться напряжение. В результате он быстро разряжается, что вызывает открытие диода VD2 с подключением к входу 4 усилителя DA1 резисторов R19 и R24*. Уменьшение вследствие этого напряжения на инвертирующем входе 4 усилителя DA1 обеспечивает смещение включения блокировки в зону более низких частот вращения коленчатого вала двигателя.
Если частота вращения nб выбирается на уровне 2100 — 2300 мин-|, то частота вращения пдб, соответствующая подаче команды от элемента корректировки на включение блокировки, устанавливается на уровне 1500 — 1600 мин-1.
На величину nрб элемент корректировки не оказывает влияния. Этот элемент подает команду на перенастройку порогового устройства только при одновременном соблюдении двух условий: nк>nДб и наличие воздействия водителя на рычаг переключения передач для замыкания контактов выключателя sbc-
При трогании автомобиля с места водитель включает низшую передачу, когда двигатель работает с небольшой частотой вращения пк, которая меньше значения пдб. Поэтому в процессе разгона автомобиля на низшей передаче элемент корректировки не влияет на режим блокировки сцепления, что и требуется для быстрого увеличения частоты вращения коленчатого вала в начальной стадии разгона автомобиля. Но уже после перехода на следующую передачу элемент корректировки может вступить в действие для обеспечения скорейшей блокировки сцепления.
Работа ЭПС с электронной системой управления. При трогании автомобиля с места по мере увеличения частоты вращения пк коленчатого вала растет напряжение Uвых на выходе ПЧН, в результате чего уменьшается сила тока Iэм в катушке электромагнита ЭПС. ЭПС обычно регулируется так, что автомобиль трогается с места, когда сила тока Iэм становится равной 1,7 — 1,8 А, чему при основном режиме блока соответствует частота вращения nк= 1100-:-1300 мин-1.
После того, как частота вращения увеличивается до пб = =2100-4-2200 мин-1, напряжение U„ых возрастает до уровня, обеспечивающего срабатывание порогового устройства- узла блокировки сцепления. Пороговое устройство включает элемент плавного включения блокировки, который в течение 1,5 — 2 с уменьшает силу тока в обмотке электромагнита ЭПС до нуля, следствием чего является блокировка сцепления.
После срабатывания узла блокировки сцепления обмотка электромагнита вновь может быть подключена к бортовой сети через регулятор тока (РТ), если вследствие снижения частоты вращения пк до значения Прб= 1100 — 1200 мин-1
напряжение на выходе ПЧН уменьшится до величины, при которой выключится пороговое устройство.
Если передачи автомобиля включаются, когда частота вращения коленчатого вала превышает 1500 — 1600 мин-1 и в процессе переключения она не падает ниже 1200 — 1300 мин*-1, то после окончания переключения передач сцепление будет заблокировано. И в этом случае разблокировка сцепления произойдет, когда частота вращения мк уменьшится до значения лрб, при котором выключится пороговое устройство.
Работа блока во вспомогательном режиме будет протекать аналогично, но трогание автомобиля с места начнется при значении Пк= 1700ч-1900 мин-1, а величины Пб и про составят соответственно 2700 — 3000 мин-1
и 1700 — 2000 мин-1.